1 . 如图所示为某款无人机铭牌上标注的各项参数,则下列说法正确的是( )
| 工作额定电压 | 20V | 工作额定电流 | 1A |
| 电池容量 | 2250mA·h锂电池 | 电池能量 | 45Wh |
| 整机质量 | 250g | 主摄像素数 | 4800万 |
| A.该无人机的额定功率为20W |
B.该无人机内部电路的总电阻为 |
| C.电池充满电后储存的总电荷量为2.250C |
| D.无人机电池充满电后可持续飞行约为2.25小时 |
您最近一年使用:0次
2 . 电容器储能已经广泛应用于电动汽车,风光发电储能,电力系统中电能质量调节。电容器储能的原理是,当电容器充电后,所带电荷量为Q,两极板间的电势差为U,则板间储存了电能。如图是电容为C的电容器两极板间电势差u和所带电荷量q的 图像,则( )
图像,则( )
图像,则( )
| A.该电容器的电容C随电荷量q增大而增大 |
| B.图像中直线的斜率等于该电容器电容C |
| C.电源对该电容器充电为Q时,电源对该电容器做的功为QU |
D.电源对该电容器充电为Q时,该电容器储存的电能为 |
您最近一年使用:0次
3 . 如图所示,若 轴表示时间,
轴表示时间, 轴表示速度,则该图线下的面积表示位移,直线
轴表示速度,则该图线下的面积表示位移,直线 的斜率表示物体在该时刻的加速度大小。若令轴和轴分别表示其他物理量,则可以反映在某种情况下相应物理量之间的关系。下列说法错误的是( )
的斜率表示物体在该时刻的加速度大小。若令轴和轴分别表示其他物理量,则可以反映在某种情况下相应物理量之间的关系。下列说法错误的是( )

轴表示时间,轴表示速度,则该图线下的面积表示位移,直线的斜率表示物体在该时刻的加速度大小。若令轴和轴分别表示其他物理量,则可以反映在某种情况下相应物理量之间的关系。下列说法错误的是( )| A.若电场方向平行于轴,轴表示位置,轴表示电势,则直线的斜率表示对应位置处的电场强度大小 |
| B.若轴表示时间,轴表示穿过单匝金属线圈的磁通量,则直线的斜率表示该金属线圈产生的电动势大小 |
| C.若轴表示流经某电阻的电流,轴表示该电阻两端的电压,则图线下面积表示电阻的功率 |
| D.若轴表示时间,轴表示通过导体的电流,则该图线下面积表示这段时通过导体横截面积的电荷量 |
您最近一年使用:0次
4 . 扫地机器人是智能家用电器的一种,它利用自身携带的小型吸尘部件进行吸尘清扫,如图表所示为某款扫地机器人的铭牌标有的数据,则该扫地机器人( )

电机基本参数 | |
产品尺寸 |
|
电池 |
|
质量 |
|
无线连接 |
|
工作额定电压 |
|
工作额定功率 |
|

 锂电池
锂电池
 智能快连
智能快连

| A.额定工作电流为5000mA |
| B.以额定电压工作时,每分钟消耗电能为2400J |
| C.以额定电压工作时,电机的内阻为10Ω |
| D.电池充满电后储存的总能量为5000J |
您最近一年使用:0次
5 . 如图为某手机电池的铭牌,第一行标有“3.8V,3000mAh(11.4Wh)”。对该铭牌参数的分析,下列说法正确的是( )

| A.铭牌中的Wh是功率的单位 |
| B.铭牌中的mAh是能量的单位 |
| C.该电池放电时能输出的总能量约为11.4J |
D.该电池放电时能输出的总电荷量约为 |
您最近一年使用:0次
6 . 下表所示的是某型号洗衣机铭牌中所列的部分技术数据,根据表中提供的数据,求:
(1)在额定电压下洗衣或脱水时,通过洗衣机的电流 ;
;
(2)洗衣、脱水 消耗的电能
消耗的电能 (单位用千瓦时
(单位用千瓦时 )。
)。
| 额定电压 |  |
| 额定频率 |  |
| 额定洗衣、脱水功率 |  |
;(2)洗衣、脱水
消耗的电能(单位用千瓦时)。
您最近一年使用:0次
7 . 图甲所示的装置是斯特林发电机,其工作原理图可以简化为图乙。已知矩形导线框的匝数为N,面积为S,处在磁感应强度大小为B的匀强磁场中,矩形导线框以角速度ω绕垂直磁场方向的轴 匀速转动,线框与理想变压器原线圈相连。理想变压器原、副线圈的匝数比为1:4,图示时刻线框平面与磁感线垂直并以此时刻为计时起点,
匀速转动,线框与理想变压器原线圈相连。理想变压器原、副线圈的匝数比为1:4,图示时刻线框平面与磁感线垂直并以此时刻为计时起点, 为定值电阻,R为滑动变阻器,交流电压表①、②均视为理想电表,不计线框的电阻。下列说法正确的是( )
为定值电阻,R为滑动变阻器,交流电压表①、②均视为理想电表,不计线框的电阻。下列说法正确的是( )

匀速转动,线框与理想变压器原线圈相连。理想变压器原、副线圈的匝数比为1:4,图示时刻线框平面与磁感线垂直并以此时刻为计时起点,为定值电阻,R为滑动变阻器,交流电压表①、②均视为理想电表,不计线框的电阻。下列说法正确的是( )A.线框从图示位置开始转过 的过程中,产生的平均电动势为 的过程中,产生的平均电动势为 |
B.线框从图示位置开始转过 时,电压表V1的示数为 时,电压表V1的示数为 |
| C.滑动变阻器的滑片向d端滑动的过程中,电压表V2的示数始终为2NBSω |
| D.滑动变阻器的滑片向c端滑动的过程中,的发热功率增大 |
您最近一年使用:0次
名校
8 . 机器人
机器人(Robot)是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。
(1)某机器人工作的额定电压为15V,额定功率为30W,充电时额定电压为24V,额定电流为0.5A,电池容量为2000mA·h,则下列说法不正确的是( )
(2)如图(b)所示电路,在滑动变阻器的滑片P向左端滑动过程中,电压表、电流表的示数变化情况为( )

(3)某同学想研究机器人中的一种特殊导电材料Z的导电规律:
①为了测量通过Z的电流随电压变化规律,该同学设计了如图1的电路,但在实验的过程中发现该电路不能使Z的电压从零开始逐渐增大,请在图上添加导线,使Z的电压能从零逐渐增大__________ 。

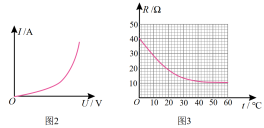
②上述实验测得Z的电流与电压的关系,作出如图2的I—U图线;根据图像可判断Z的电阻随电流变大而__________ (选涂: A.增大 B.不变 C.减小);
③实验中的滑动变阻器用某种金属丝绕制而成,若有一根长为L、直径为d的金属丝,测得其阻值为R,则电阻率ρ=__________ 。
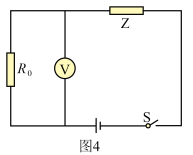
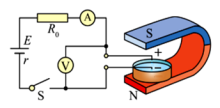
(4)该同学又用温度传感器得到Z的电阻随温度的变化规律如图3。并利用这个规律设计制作了如图4的测温电路。已知电源电动势E=1.5V、内阻r=5Ω、R0=10Ω。闭合开关,电压表示数为0.5V,求:
(1)回路中的电流;
(2)Z材料的电阻;
(3)此时Z的温度(结果保留3位有效数字)。
机器人(Robot)是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。
(1)某机器人工作的额定电压为15V,额定功率为30W,充电时额定电压为24V,额定电流为0.5A,电池容量为2000mA·h,则下列说法不正确的是( )
| A.从零开始充满电大约需要4h |
| B.2000mA·h指电池储存的电能 |
| C.正常工作时的电流为2A |
| D.充满电后可连续正常工作的时间约为1h |
(2)如图(b)所示电路,在滑动变阻器的滑片P向左端滑动过程中,电压表、电流表的示数变化情况为( )
| A.两表示数均增大 |
| B.电压表示数增大,电流表示数减小 |
| C.两表示数均减小 |
| D.电压表示数减小,电流表示数增大 |
(3)某同学想研究机器人中的一种特殊导电材料Z的导电规律:
①为了测量通过Z的电流随电压变化规律,该同学设计了如图1的电路,但在实验的过程中发现该电路不能使Z的电压从零开始逐渐增大,请在图上添加导线,使Z的电压能从零逐渐增大
②上述实验测得Z的电流与电压的关系,作出如图2的I—U图线;根据图像可判断Z的电阻随电流变大而
③实验中的滑动变阻器用某种金属丝绕制而成,若有一根长为L、直径为d的金属丝,测得其阻值为R,则电阻率ρ=
(4)该同学又用温度传感器得到Z的电阻随温度的变化规律如图3。并利用这个规律设计制作了如图4的测温电路。已知电源电动势E=1.5V、内阻r=5Ω、R0=10Ω。闭合开关,电压表示数为0.5V,求:
(1)回路中的电流;
(2)Z材料的电阻;
(3)此时Z的温度(结果保留3位有效数字)。
您最近一年使用:0次
名校
9 . 如图所示,在盛有导电液体的水平玻璃皿中心放一个圆柱形电极接电源的负极,沿边缘内壁放另一个圆环形电极接电源的正极做“旋转液体实验”,其中蹄形磁铁两极间正对部分的磁场可视为匀强磁场,磁铁上方为S极。电源的电动势 ,限流电阻
,限流电阻 。闭合开关S后,当导电液体旋转稳定时理想电压表的示数为3.5V,理想电流表示数为0.5A。则( )
。闭合开关S后,当导电液体旋转稳定时理想电压表的示数为3.5V,理想电流表示数为0.5A。则( )
,限流电阻。闭合开关S后,当导电液体旋转稳定时理想电压表的示数为3.5V,理想电流表示数为0.5A。则( )| A.从上往下看,液体顺时针旋转 |
| B.液体消耗的电功率为1.75W |
C.玻璃皿中两电极间液体的电阻为 |
D.电源的内阻为 |
您最近一年使用:0次
2024-01-20更新
|
348次组卷
|
2卷引用:北京市朝阳区2023-2024学年高三上学期期末质量检测物理试题
10 . 利用图像研究物理问题是物理学中重要的研究方法。如图所示,若令x轴和y轴分别表示某个物理量,则图像可以反所映某种情况下物理量之间的关系,在有些情况中,图线上任一点的切线斜率、图线与x轴围成的面积也有相应的物理含义。下列说法不正确 的是( )

| A.对于做直线运动的物体,若y轴表示物体的加速度,x轴表示时间,则图线与x轴所用的面积表示这段时间内物体速度的变化量 |
| B.对于做直线运动的物体、若y轴表示合力对物体所做的功,x轴表示时间,则图象切线的斜率表示相应时刻合力对物体做功的瞬时功率 |
| C.对y轴表示通过小灯泡的电流,x轴表示小灯泡两端的电压,则图线与x轴所围的面积表示小灯泡的电功率 |
| D.若y轴表示通过电器元件的电流,x轴表示时间,则图线与x轴所围的面积表示这段时间内通过该电器元件的电荷量 |
您最近一年使用:0次


