阅读短文,回答问题。
超声波指纹识别技术
传统指纹识别 TouchID 已成为智能手机的标配。随着黑科技超声波指纹识别技术 SenseID 的出现,屏下指纹的全面屏手机变得越来越普及。
与传统指纹识别不同,超声波指纹识别技术是通过发射超声波扫描紧贴屏幕的指纹,并根据接收到的反射超声波分析得出指纹的信息,进行比对解锁。
超声波是频率超过人类听觉上限的声波,具有较强的穿透能力,能够穿透玻璃、铝、不锈钢、蓝宝石或塑料等。此外,超声波扫描能够不受手指上可能存在的污物影响,例如汗水、护手霜或凝露等,从而提供一种更稳定、更精确的认证方法。
(1)超声波___________ (选填“能”或“不能”)在真空中传播。
(2)超声波传播中遇到障碍物时__________ (填“会”或“不会”)有一部分被反射回来形成回声。
(3) SenseID 系统能置于手机内部,可以让超声波透过屏幕进行指纹识别,是因为超声波具有__________ 的特点。
(4) SenseID 是利用了超声波传递______ (选填“信息”或“能量”)的特性,请你再举一个利用超声波这种特性的例子: __________ 。
(5) SenseID 系统利用了仿生学原理,它模仿了下列哪个选项的生物________ 。
A. 蝙蝠 B.蜘味 C.青蛙 D.猫
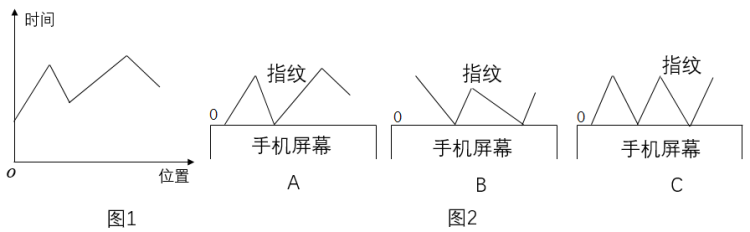
(6) SenseID 系统向手指上若干个位置发射超声波,检测到被手指反射的信号时所需的时间随位置的变化情况如图 1 所示,由图可知这些位置指纹的大致形状,图2选项最符合的是_________ 。
超声波指纹识别技术
传统指纹识别 TouchID 已成为智能手机的标配。随着黑科技超声波指纹识别技术 SenseID 的出现,屏下指纹的全面屏手机变得越来越普及。
与传统指纹识别不同,超声波指纹识别技术是通过发射超声波扫描紧贴屏幕的指纹,并根据接收到的反射超声波分析得出指纹的信息,进行比对解锁。
超声波是频率超过人类听觉上限的声波,具有较强的穿透能力,能够穿透玻璃、铝、不锈钢、蓝宝石或塑料等。此外,超声波扫描能够不受手指上可能存在的污物影响,例如汗水、护手霜或凝露等,从而提供一种更稳定、更精确的认证方法。
(1)超声波
(2)超声波传播中遇到障碍物时
(3) SenseID 系统能置于手机内部,可以让超声波透过屏幕进行指纹识别,是因为超声波具有
(4) SenseID 是利用了超声波传递
(5) SenseID 系统利用了仿生学原理,它模仿了下列哪个选项的生物
A. 蝙蝠 B.蜘味 C.青蛙 D.猫
(6) SenseID 系统向手指上若干个位置发射超声波,检测到被手指反射的信号时所需的时间随位置的变化情况如图 1 所示,由图可知这些位置指纹的大致形状,图2选项最符合的是
20-21八年级上·全国·期中 查看更多[4]
江苏省南通市启秀中学2020-2021学年八年级上学期期中考试物理试题(已下线)【专题】2021-2022学年八年级物理上册课后培优练(人教版) 第二章 声现象 课时2.3声音的利用广东省揭阳市宝塔实验学校2022-2023学年八年级上学期第一次质量监测物理试题广东省普宁市第二中学2021-2022学年八年级上学期第一次月考物理试题
更新时间:2020-11-28 12:52:04
|
【知识点】 超声波的利用
相似题推荐
科普阅读题
|
较难
(0.4)
名校
【推荐1】阅读短文,回答问题。
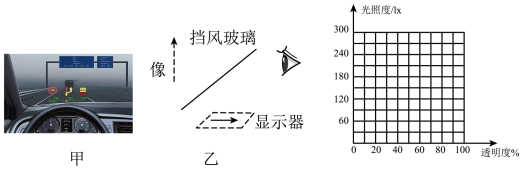
某款新能源智能汽车,车顶覆盖薄膜式太阳能电板:车窗采用“智能玻璃”,除了可实现调节温度和透明度(透过玻璃的光照度与入射光照度之比),还具有单向透光功能,可以从车内看到车外景象,而车外看不见车内景象;车身配有多个雷达,充分提高了行车的安全性。汽车高速行驶时,驾驶员低头观看仪表信息,在前方遇有紧急情况就有可能囚来不及采取有效措施造成事故。为了高速行驶的车辆研发了汽车抬头显示(如图甲)又叫汽车平视显示系统,它是利用平面镜成像原理(如图乙)将显示器上的重要行车数据通过前挡风玻璃投射在正前方,驾驶员透过挡风玻璃往前方看的时候,能够轻易的将车外的景象与车辆信息通过挡风玻璃所成的像融合在一起。驾驶员不必低头,就可以看到车辆信息,如车速、油耗、导航等,从而避免分散对前方道路的注意力。
(1)汽车雷达启动后发出______ (选填“超声波”、“次声波”或“激光”),经过周边的物体反射后,可判断车与障碍物的距离,这种物质 ______ (选填“能”或“不能”)用于太空测距。改变按汽车方向盘上喇叭开关的力度,可改变喇叭发出声音的 ______
(2)薄膜式太阳能电板应设计成______ (填“黑”或“白”)色;炎热的夏天“智能玻璃”的单向透光可以有效减少 ______ (填“红”或“紫”)外线对人体皮肤的伤害。
(3)挡风玻璃所成仪表盘像的原理是光的______ 。如果成像不清晰,可以 ______ (选填“增强”或“减弱”)显示器亮度,改善成像效果。
(4)“智能玻璃”能根据车外光照度自动调节玻璃的透明度,实现车内的光照度为一个适宜的定值,经测算车外光照度(单位“勒”符号1x)和玻璃透明度的关系数据如下表所示。
请用描点法作出车外光照度随玻璃的透明度变化的关系图像______ ,并根据图像回答,当外光照度为901x时。“智能玻璃”的透明度会自动调节约为 ______ %。
新能源智能汽车
某款新能源智能汽车,车顶覆盖薄膜式太阳能电板:车窗采用“智能玻璃”,除了可实现调节温度和透明度(透过玻璃的光照度与入射光照度之比),还具有单向透光功能,可以从车内看到车外景象,而车外看不见车内景象;车身配有多个雷达,充分提高了行车的安全性。汽车高速行驶时,驾驶员低头观看仪表信息,在前方遇有紧急情况就有可能囚来不及采取有效措施造成事故。为了高速行驶的车辆研发了汽车抬头显示(如图甲)又叫汽车平视显示系统,它是利用平面镜成像原理(如图乙)将显示器上的重要行车数据通过前挡风玻璃投射在正前方,驾驶员透过挡风玻璃往前方看的时候,能够轻易的将车外的景象与车辆信息通过挡风玻璃所成的像融合在一起。驾驶员不必低头,就可以看到车辆信息,如车速、油耗、导航等,从而避免分散对前方道路的注意力。
(1)汽车雷达启动后发出
(2)薄膜式太阳能电板应设计成
(3)挡风玻璃所成仪表盘像的原理是光的
(4)“智能玻璃”能根据车外光照度自动调节玻璃的透明度,实现车内的光照度为一个适宜的定值,经测算车外光照度(单位“勒”符号1x)和玻璃透明度的关系数据如下表所示。
| 透明度% | 20 | 30 | 40 | 50 | 60 | 100 |
| 光照度/lx | 300 | 200 | 150 | 120 | 100 | 60 |
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐2】阅读短文,回答问题。
我国研制的某款智能防疫机器人,具有自主测温、移动、避障等功能。
机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上,通过处理系统转变为热图像,实现对人群的体温检测。当发现超温人员,系统会自动语音播报,并在显示屏上用红色框标注入的脸部。
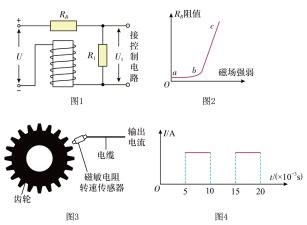
机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,如图1所示为控制电机运转的原理电路,U为输入电压,R1为定值电阻,RB为磁敏电阻,阻值随外加磁场强弱的变化而改变。
机器人为有效避障,在移动过程中会通过传感器发射、接收超声波或激光来侦测障碍物信息。当感知到前方障碍物时,机器人依靠减速器进行减速,并重新规划行驶路线。超声波传感器一般作用距离较短,它的成本低、实现方法简单、技术成熟。激光雷达的测量距离可以达到几十米甚至上百米,角度分辨率高,通常可以达到零点几度,测距的精度也高。但测量距离的置信度会反比于接收信号幅度的平方,因此,黑体或者远距离的物体距离测量不会像光亮的、近距离的物体那么好的估计。并且,对于透明材料,比如玻璃,激光雷达就无能为力了。
如表为机器人的部分参数,“电池比能量”为单位质量的电池所能输出的电能;“减速器的减速比”为输入转速与输出转速的比值。
(1)机器人在行进过程中遇到玻璃等透明障碍物时,利用_____ (选填“超声波”或“激光”)才能较好感知到障碍物。
(2)若机器人以最大速度沿水平路面匀速直线运动7min,此过程中机器人受到的阻力为_____ N,消耗的电能约占电池所能输出总电能的 _____ %。
(3)控制电机运转的磁敏电阻阻值随磁场强弱变化的图线如图2所示,当磁敏电阻在正常工作区时,即使图甲电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动,则磁敏电阻的正常工作区对应图中_____ (选填“ab”或“bc”)段,已知无磁场时RB阻值为200Ω,R1的阻值为400Ω,线圈电阻忽略不计,当U为24V时,处在磁场中的RB电功率为0.32W,则R1两端的电压U1是 _____ V。
(4)如图3所示是机器人测速系统的部分装置简化图,磁敏电阻转速传感器安装在驱动电机旋转齿轮的外侧,当传感器对准齿轮两齿间隙时,电缆输出电流为0。某次当驱动电机的齿轮匀速转动时,电缆输出如图4所示周期性变化的电流,则1s内对准传感器的齿间隙共有_____ 个;若此时机器人遇到障碍物,减速器启动,则经减速器降速后的齿轮转速为 _____ r/min。
智能防疫机器人
我国研制的某款智能防疫机器人,具有自主测温、移动、避障等功能。
机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上,通过处理系统转变为热图像,实现对人群的体温检测。当发现超温人员,系统会自动语音播报,并在显示屏上用红色框标注入的脸部。
机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,如图1所示为控制电机运转的原理电路,U为输入电压,R1为定值电阻,RB为磁敏电阻,阻值随外加磁场强弱的变化而改变。
机器人为有效避障,在移动过程中会通过传感器发射、接收超声波或激光来侦测障碍物信息。当感知到前方障碍物时,机器人依靠减速器进行减速,并重新规划行驶路线。超声波传感器一般作用距离较短,它的成本低、实现方法简单、技术成熟。激光雷达的测量距离可以达到几十米甚至上百米,角度分辨率高,通常可以达到零点几度,测距的精度也高。但测量距离的置信度会反比于接收信号幅度的平方,因此,黑体或者远距离的物体距离测量不会像光亮的、近距离的物体那么好的估计。并且,对于透明材料,比如玻璃,激光雷达就无能为力了。
如表为机器人的部分参数,“电池比能量”为单位质量的电池所能输出的电能;“减速器的减速比”为输入转速与输出转速的比值。
| 电池的质量 | 10kg | 减速器的减速比 | 30:1 |
| 电池比能量 |  | 驱动电机的输入总功率 | 400W |
| 移动速度 | 0.1~1m/s | 驱动电机将电能转化为机械能的效率 | 60% |
(1)机器人在行进过程中遇到玻璃等透明障碍物时,利用
(2)若机器人以最大速度沿水平路面匀速直线运动7min,此过程中机器人受到的阻力为
(3)控制电机运转的磁敏电阻阻值随磁场强弱变化的图线如图2所示,当磁敏电阻在正常工作区时,即使图甲电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动,则磁敏电阻的正常工作区对应图中
(4)如图3所示是机器人测速系统的部分装置简化图,磁敏电阻转速传感器安装在驱动电机旋转齿轮的外侧,当传感器对准齿轮两齿间隙时,电缆输出电流为0。某次当驱动电机的齿轮匀速转动时,电缆输出如图4所示周期性变化的电流,则1s内对准传感器的齿间隙共有
您最近一年使用:0次
【推荐3】阅读短文,回答问题:
蝙蝠是利用超声波的高手,它视觉很差,被认为是动物界的“盲人”。为了研究蝙蝠如何在黑暗的夜晚捕食昆虫,意大利科学家将蝙蝠和猫头鹰一起放在完全黑暗的密室里。研究发现, 蝙蝠能轻易地分辨方位、躲避障碍物,而猫头鹰会撞上障碍物。如果将蝙蝠的耳朵堵住,它就会丧失方向感,不能躲避障碍物。直到1930年,哈佛大学的一位大学生才利用仪器探测到蝙蝠发出的是超声波,从而揭开了蝙蝠捕食之谜。原来,黑暗中飞行的蝙蝠通过鼻腔每秒发射 10-20 次超声波,这种声波可以探索到很小的障碍物,声波遇到障碍物后便会发生反射。蝙蝠根据接受到反射回来声音的方向和时间间隔,就能了解周围环境,辨别位置和捕食昆虫。这种利用声波在传播过程中有反射现象的原理探测物体方位和距离的方式叫回声定位。
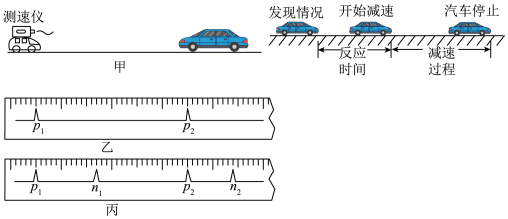
科学家受到回声定位的启发,发明了超声波测速仪.图甲是公路上用超声波测速仪测量车速的示意图,测速仪每隔一定的时间发射一次超声波,显示屏上能显示发出和接收到的超声波信号, 并能读出两个信号的时间差,从而测出被测物体的位置和速度.如果发出的超声波遇不到反射物,显示屏上只显示发出的超声波,如图乙中的p1、p2所示;如果测速仪正前方有一辆汽车, 测速仪将接收到汽车反射回来的超声波,p1、p2的发射波n1、n2如图丙所示。
(1)科学家将蝙蝠和猫头鹰一起放在完全黑暗的密室里,发现蝙蝠能轻易地分辨方位、躲避障碍物。这一过程属于科学探究中的______ ;
A.提出问题 B.猜想假设 C.进行实验 D.得出结论
(2)如果图乙和图丙中的p1、p2之间的时间间隔 ,则测速仪每秒钟发射
,则测速仪每秒钟发射______ 次超声波, 图丙中p1、n1之间的时间间隔t1=0.2s,超声波在空气中传播速度是v=340m/s,可知超声波第一次发射时汽车离测速仪的距离为______ m;
(3)图丙p2、n2之间的时间间隔t2小于之p1、n1之间间隔t1,由此可以判断汽车的运动情况是______ ;
A.静止 B.向左运动 C.向右运动 D.无法判断
(4)在另一实验中,某志愿者的刹车反应时间(即图中“反应过程”所用时间)是 0.4s。该志愿者驾车以72km/h 的速度在实验场的水平路面上匀速行驶,从发现情况到汽车停止,行驶距离33m, 则经过______ m 距离后汽车才开始减速;若志愿者边打电话边驾车,以 72km/h 的速度在试验场的水平路面上匀速行驶,在发现情况到汽车停止,行驶距离 39m,此时志愿者的刹车反应时间是______ s。由此研究可知,驾驶员驾驶时打电话,驾驶员的刹车反应会______ 。(选填“变快”、“变慢”或“不变”)
蝙蝠与测速仪
蝙蝠是利用超声波的高手,它视觉很差,被认为是动物界的“盲人”。为了研究蝙蝠如何在黑暗的夜晚捕食昆虫,意大利科学家将蝙蝠和猫头鹰一起放在完全黑暗的密室里。研究发现, 蝙蝠能轻易地分辨方位、躲避障碍物,而猫头鹰会撞上障碍物。如果将蝙蝠的耳朵堵住,它就会丧失方向感,不能躲避障碍物。直到1930年,哈佛大学的一位大学生才利用仪器探测到蝙蝠发出的是超声波,从而揭开了蝙蝠捕食之谜。原来,黑暗中飞行的蝙蝠通过鼻腔每秒发射 10-20 次超声波,这种声波可以探索到很小的障碍物,声波遇到障碍物后便会发生反射。蝙蝠根据接受到反射回来声音的方向和时间间隔,就能了解周围环境,辨别位置和捕食昆虫。这种利用声波在传播过程中有反射现象的原理探测物体方位和距离的方式叫回声定位。
科学家受到回声定位的启发,发明了超声波测速仪.图甲是公路上用超声波测速仪测量车速的示意图,测速仪每隔一定的时间发射一次超声波,显示屏上能显示发出和接收到的超声波信号, 并能读出两个信号的时间差,从而测出被测物体的位置和速度.如果发出的超声波遇不到反射物,显示屏上只显示发出的超声波,如图乙中的p1、p2所示;如果测速仪正前方有一辆汽车, 测速仪将接收到汽车反射回来的超声波,p1、p2的发射波n1、n2如图丙所示。
(1)科学家将蝙蝠和猫头鹰一起放在完全黑暗的密室里,发现蝙蝠能轻易地分辨方位、躲避障碍物。这一过程属于科学探究中的
A.提出问题 B.猜想假设 C.进行实验 D.得出结论
(2)如果图乙和图丙中的p1、p2之间的时间间隔
,则测速仪每秒钟发射(3)图丙p2、n2之间的时间间隔t2小于之p1、n1之间间隔t1,由此可以判断汽车的运动情况是
A.静止 B.向左运动 C.向右运动 D.无法判断
(4)在另一实验中,某志愿者的刹车反应时间(即图中“反应过程”所用时间)是 0.4s。该志愿者驾车以72km/h 的速度在实验场的水平路面上匀速行驶,从发现情况到汽车停止,行驶距离33m, 则经过
您最近一年使用:0次


