【探究名称】探究杠杆的平衡条件
【猜想与假设】
猜想一:动力×动力臂=阻力×阻力臂;
猜想二:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。
【设计实验与进行实验】
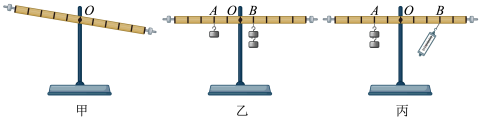
(1)如图甲所示,应将杠杆两端的螺母向______ (选填“左”或“右”)调节,使杠杆在水平位置平衡;
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,记录的数据如下表:
(3)改变钩码的______ 和钩码的位置,重复上述实验两次,记录的数据如下表:
【分析与论证】
根据小明同学的数据可验证猜想______ (选填“二”或“一和二”)是正确的。而小红同学则认为小明同学每组数据中的力臂恰好都等于支点到力的作用点的距离,具有一定的特殊性,还应改变动力或阻力的______ 进行实验;
于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想______ 是错误的。若要验证另一种猜想是否正确,必须添加的测量工具是______ 。通过以上研究,小明同学真正理解了力臂是支点到______ 的距离。
【猜想与假设】
猜想一:动力×动力臂=阻力×阻力臂;
猜想二:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。
【设计实验与进行实验】
(1)如图甲所示,应将杠杆两端的螺母向
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,记录的数据如下表:
(3)改变钩码的
实验次数 | 动力 |
| 阻力 |  间距离/ 间距离/ | |
小明 | 1 | 1.0 | 5 | 0.5 | 10 |
2 | 1.5 | 10 | 1.0 | 15 | |
3 | 1.0 | 10 | 2.0 | 5 | |
小红和小明 | 4 | 0.8 | 15 | 1.0 | 10 |
5 | 1.4 | 15 | 1.0 | 10 | |

 间距离/
间距离/
根据小明同学的数据可验证猜想
于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想
2021·江西·中考真题 查看更多[10]
2021年江西省中考物理试题江西省赣州市赣县区2020-2021学年八年级下学期期末考试物理试题(已下线)2021年江西省中考物理真题变式汇编19-20题(已下线)2022年初三毕业班物理常考点归纳与变式演练(通用版) 专题30 杠杆平衡实验、分析和计算(已下线)2022年中考物理【热点·重点·难点】专练 专项六 专项练习 专题练习3 力学探究江西省赣州市经济开发区2021-2022学年八年级下学期期末物理试题(已下线)第12讲简单机械山东省枣庄市峄城区2021-2022学年八年级下学期期末物理试题(已下线)学易金卷:5年(2019-2023)中考1年模拟物理分项汇编(江西专用) 专题12 功、机械能、简单机械和机械效率山东省烟台市海阳市2021-2022学年八年级下学期期末质量检测题物理试题
更新时间:2021-06-19 20:55:09
|
相似题推荐

实验题
|
较难
(0.4)
解题方法
【推荐1】在进行“探究杠杆的平衡条件”相关实验时,同学们通过观察如图甲所示的处于平衡状态的杠杆。对杠杆平衡条件提出以下的几种猜想:

①动力=阻力
②动力×动力臂=阻力×阻力臂
③
④动力×支点到动力作用点距离=阻力×支点到阻力作用点距离
改变图中A、B点的位置以及钩码的数量,得到杠杆平衡时的相关数据如表:
(1)根据表中的数据,可推翻上述猜想中的______ (填上述猜想的对应序号);
(2)要推翻猜想④需要做图中的哪一个实验?______ (选填对应字母);
A、 B、
B、
C、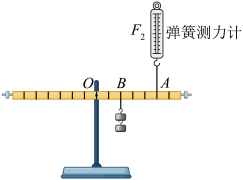 D、
D、
(3)如图A所示,此时杠杆处于平衡状态,F1为动力,钩码对杠杆的作用力F2为阻力;
①请画出F1的力臂与F2的示意图______ ;
②由杠杆平衡条件可知,F1______ F2(填“大于”或“等于”或“小于”)。
(4)如图乙所示是《天工开物》记载的踏碓(碓:dui,古代的一种给稻谷去壳的工具。用脚连续踏杆的一端,另一端就会连续起落),踏碓属于______ 杠杆。
①动力=阻力
②动力×动力臂=阻力×阻力臂
③
④动力×支点到动力作用点距离=阻力×支点到阻力作用点距离
改变图中A、B点的位置以及钩码的数量,得到杠杆平衡时的相关数据如表:
| 动力/N | OA长度/cm | 阻力/N | OB长度/cm |
| 3 | 2 | 1 | 6 |
| 2 | 3 | 3 | 2 |
| 1 | 3 | 3 | 1 |
(2)要推翻猜想④需要做图中的哪一个实验?
A、
B、 C、
D、 (3)如图A所示,此时杠杆处于平衡状态,F1为动力,钩码对杠杆的作用力F2为阻力;
①请画出F1的力臂与F2的示意图
②由杠杆平衡条件可知,F1
(4)如图乙所示是《天工开物》记载的踏碓(碓:dui,古代的一种给稻谷去壳的工具。用脚连续踏杆的一端,另一端就会连续起落),踏碓属于
您最近一年使用:0次
实验题
|
较难
(0.4)
【推荐2】在探究“杠杆的平衡条件”实验中,所用的实验器材有:杠杆(杠杆上每小格长为2cm)、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个(每个钩码重lN)。
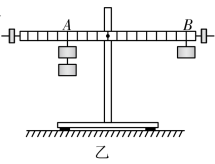
(1)实验前,杠杆静止在如图甲所示的位置,此时杠杆处于______ (选填“平衡”或“不平衡”)状态;
(2)实验时,使杠杆在______ 位置平衡,主要是为了便于测量______ 大小,因此他把杠杆右端的平衡螺母调到最右边,但是杠杆仍然不能水平平衡,接下来他应该______ ;
(3)杠杆在水平位置平衡后,小明在杠杆A点处挂上2个钩码,作为动力F1,B点处挂上1个钩码,作为阻力F2,杠杆恰好在水平位置平衡,如图乙所示,分别测量出两个力的力臂l1和l2,计算后发现:F1l1=F2l2,便得出杠杆的平衡条件是:F1l1=F2l2。但小红认为小明这种实验处理方法是不完善的,理由是______ ;
(4)接着,小明提出新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小明利用如图丙所示装置进行探究,在杠杆D点处挂上2个钩码,用弹簧测力计在C点处竖直向上拉,使杠杆在水平位置处于平衡状态,此时弹簧测力计的示数如图丙所示,则弹簧测力计的拉力是______ N.以弹簧测力计的拉力为动力F1,钩码重力为阻力F2,多次调整力和力臂的大小进行测量,发现:F1l1总是大于F2 l 2,其原因主要是受______ 的影响;

(5)小明又把弹簧测力计的作用点固定,只改变测力计与水平方向的角度θ,则能描述测力计示数F与θ关系的图象是______ 。
A.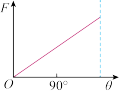 B.
B.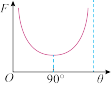 C.
C. D.
D.
(1)实验前,杠杆静止在如图甲所示的位置,此时杠杆处于
(2)实验时,使杠杆在
(3)杠杆在水平位置平衡后,小明在杠杆A点处挂上2个钩码,作为动力F1,B点处挂上1个钩码,作为阻力F2,杠杆恰好在水平位置平衡,如图乙所示,分别测量出两个力的力臂l1和l2,计算后发现:F1l1=F2l2,便得出杠杆的平衡条件是:F1l1=F2l2。但小红认为小明这种实验处理方法是不完善的,理由是
(4)接着,小明提出新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小明利用如图丙所示装置进行探究,在杠杆D点处挂上2个钩码,用弹簧测力计在C点处竖直向上拉,使杠杆在水平位置处于平衡状态,此时弹簧测力计的示数如图丙所示,则弹簧测力计的拉力是
(5)小明又把弹簧测力计的作用点固定,只改变测力计与水平方向的角度θ,则能描述测力计示数F与θ关系的图象是
A.
B.C.D.
您最近一年使用:0次
实验题
|
较难
(0.4)
解题方法
【推荐3】探究杠杆的平衡条件:
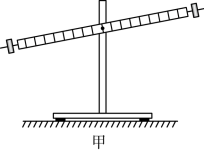
(1)安装好杠杆(支点与杠杆重心不重合),小明观察到杠杆静止在如图 1 所示的位置。若不调节而直接在杠杆左右两侧挂上钩码进行实验,仍使杠杆在原位置平衡,则实验中将存在___________ 的问题;若通过钩码位置的调节使杠杆转至水平位置平衡,则又存在___________ 的问题;

(2)于是小明先将平衡螺母向_____ 调节,使杠杆在水平位置平衡,然后在杠杆左侧挂 3 个钩码(每个钩码重 0.5N),右侧用一只已正立校零的弹簧测力计竖直向下拉使杠杆再次在水平位置平衡(如图 2 所示),同组的小华提醒小明弹簧测力计倒过来使用时测得的拉力会偏__________ (选填“大”或“小”)。小明和小华经过共同商讨,重新设计了如图 3、图 4 两个实验方案,其中可行的是________ ,此方案杠杆平衡时,弹簧测力计的示数为___ N;
(3)如何才能准确测出竖直向下的拉力,小明和小华一起向老师请教到一种校零方法:取两个弹簧测力计,先将它们正立校零,然后按如图 5 所示秤钩相挂,此时只要移动弹簧测力计______ (选填“甲”或“乙”) 的指针,使其示数与另一弹簧测力计示数相同即可完成校零。
(1)安装好杠杆(支点与杠杆重心不重合),小明观察到杠杆静止在如图 1 所示的位置。若不调节而直接在杠杆左右两侧挂上钩码进行实验,仍使杠杆在原位置平衡,则实验中将存在
(2)于是小明先将平衡螺母向
(3)如何才能准确测出竖直向下的拉力,小明和小华一起向老师请教到一种校零方法:取两个弹簧测力计,先将它们正立校零,然后按如图 5 所示秤钩相挂,此时只要移动弹簧测力计
您最近一年使用:0次


