初三同学在探究“杠杆的平衡条件”,提供的器材有:杠杆、钩码(每个钩码质量均为50g)、弹簧测力计。
(1)第一小组的同学设计了实验过程,经历如下一些操作步骤:
a.安装好杠杆并调节平衡螺母使其在水平位置平衡
b.改变两边钩码数量,重复以上步骤再做两次实验
c.改变挂钩码的位置,使杠杆在水平位置平衡,记录实验数据
d.在杠杆两边分别挂上数量不同钩码
①本实验的合理操作步骤顺序是___________ ;
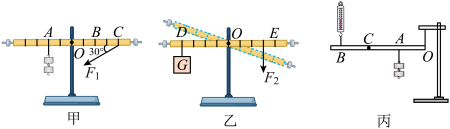
②调节杠杆水平平衡后,如图甲所示,在 A 处挂两个钩码,为了使杠杆水平平衡,在 C点用调节好的弹簧测力计沿图示方向斜向下拉,当测力计示数 F1为___________ N 时,杠杆将水平平衡;
③通过多次实验,总结得出杠杆平衡的条件是___________ 。所以对于杠杆“哪边重往哪边沉”这句话的理解,这里的“重”实际指的是___________ 比较大;
④探究过程中,在杠杆左端的 D 点挂一个重物 G,在杠杆右端的 E 点施加一始终竖直向下的拉力 F2,使杠杆由水平位置缓慢转动到图中虚线位置,如图乙所示。则在此过程中拉力 F2的大小变化情况是___________ (选填“变大”、“变小”或“不变”);
(2)课后,第一小组同学换用如图丙所示的杠杆进行了深入探究,发现与前面的杠杆平衡条件的结论并不相符,其主要原因是:___________ ;若将钩码的悬挂点由 A 移至 C(钩码个数不变,O 和 B 的位置也不变),仍将钩码提升相同的高度,则杠杆的机械效率将___________ (选填“变大”、“变小”或“不变”)。
(1)第一小组的同学设计了实验过程,经历如下一些操作步骤:
a.安装好杠杆并调节平衡螺母使其在水平位置平衡
b.改变两边钩码数量,重复以上步骤再做两次实验
c.改变挂钩码的位置,使杠杆在水平位置平衡,记录实验数据
d.在杠杆两边分别挂上数量不同钩码
①本实验的合理操作步骤顺序是
②调节杠杆水平平衡后,如图甲所示,在 A 处挂两个钩码,为了使杠杆水平平衡,在 C点用调节好的弹簧测力计沿图示方向斜向下拉,当测力计示数 F1为
③通过多次实验,总结得出杠杆平衡的条件是
④探究过程中,在杠杆左端的 D 点挂一个重物 G,在杠杆右端的 E 点施加一始终竖直向下的拉力 F2,使杠杆由水平位置缓慢转动到图中虚线位置,如图乙所示。则在此过程中拉力 F2的大小变化情况是
(2)课后,第一小组同学换用如图丙所示的杠杆进行了深入探究,发现与前面的杠杆平衡条件的结论并不相符,其主要原因是:
更新时间:2022-10-04 22:29:17
|
相似题推荐
综合题
|
较难
(0.4)
名校
解题方法
【推荐1】某物理兴趣小组设计了一套测量货车重力的模拟装置,工作原理如图所示;ABO为一水平杠杆,OA长1.2m,O为支点,AB∶OB=5∶1,平板上物体所受重力大小通过电压表读数显示,压力传感器R固定放置,R的阻值随所受压力F变化的关系如表所示。当电源电压U为12V,平板空载时,闭合开关S,电压表的示数为1.5V,平板、压杆和杠杆的质量均忽略不计;
(1)定值电阻R0的阻值;( )
(2)当平板上物体重120N时,电压表的示数;( )
(3)电池组用久后电源电压变小为8V,要求平板上重为120N的物体对应的电压表读数和电池组的电压U=12V的情况下相同,其它条件不变,只水平调节杠杆上触点B的位置即可实现,试判断并计算触点B应向___________ (选填“左”或“右”)移动___________ cm。

F/N | 0 | 4 | 8 | 12 | 16 | 20 | 23 | 25 | … |
R/Ω | 70 | 60 | 50 | 40 | 30 | 20 | 12.5 | 10 | … |
(2)当平板上物体重120N时,电压表的示数;
(3)电池组用久后电源电压变小为8V,要求平板上重为120N的物体对应的电压表读数和电池组的电压U=12V的情况下相同,其它条件不变,只水平调节杠杆上触点B的位置即可实现,试判断并计算触点B应向
您最近一年使用:0次
综合题
|
较难
(0.4)
解题方法
【推荐2】如图所示是某电子秤的原理图,AO∶BO=5∶1,压力传感器 R 表面能承受的最大压强为 2×106Pa,压力传感器 R 的电阻与压力的关系如下表所示,踏板与杠杆组件的质量可忽略不计,电源电压为 6V:(g 取 10N/kg)

(1)该电子秤空载时电流表的示数为______ A;
(2)当电流表的示数为 25mA 时,所称量物体的质量是______ kg;
(3)若压杆与压力传感器之间的最大接触面积为 2cm2,则该电子秤的最大称量值是______ kg;
(4)若增大电子秤的量程,可将 B 点的踏板向______ 移动。
| 压力 F/N | 0 | 50 | 100 | 150 | 200 | 250 | 300 | … |
| 电阻 R/Ω | 300 | 270 | 240 | 210 | 180 | 150 | 120 | … |
(1)该电子秤空载时电流表的示数为
(2)当电流表的示数为 25mA 时,所称量物体的质量是
(3)若压杆与压力传感器之间的最大接触面积为 2cm2,则该电子秤的最大称量值是
(4)若增大电子秤的量程,可将 B 点的踏板向
您最近一年使用:0次
综合题
|
较难
(0.4)
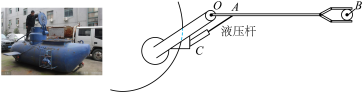
【推荐3】武汉有位厉害的残疾人,他凭借自己的智慧,制造出了“民用潜水艇”,从而实现上浮和下潜。如图是他的新宝贝“机器人潜艇”。(海水密度近似取作1.0×103kg/m3,g取10N/kg)
(1)该潜艇驾驶窗前端装有像人的手臂一样灵活的机械臂,机械臂用高强度炭纤维抗压材料制成,能自如的在海中抓取一定质量的物体并回收。某时刻机械臂牢牢抓住质量为100g、体积50cm3的不明物体,由可伸缩的液压杆顶起抓臂至水平位置如图所示,B为物体的重心,OA=10cm,OB=50cm,O点到AC的距离为5cm。
①请作出液压杆对机械臂的动力的力臂;
②求出此时液压杆为机械臂提供的动力(机械臂质量和所受浮力忽略不计);
(2)这艘机器人潜水艇的总体积为30m3,水舱没有充海水时,总质量4×103kg。该潜艇载水舱的容积至少为多少立方米时,才能在舱中注满水后使潜艇下潜?
(3)该潜艇最大潜水深度30m,潜水艇载水舱中排水泵排水流量为6m3/min,已知水面气压为105Pa,为防止载水舱中的水排不出而不能恢复储备浮力,出现潜航事故,该潜水艇载水舱中排水泵的排水功率至少为多少W?
(1)该潜艇驾驶窗前端装有像人的手臂一样灵活的机械臂,机械臂用高强度炭纤维抗压材料制成,能自如的在海中抓取一定质量的物体并回收。某时刻机械臂牢牢抓住质量为100g、体积50cm3的不明物体,由可伸缩的液压杆顶起抓臂至水平位置如图所示,B为物体的重心,OA=10cm,OB=50cm,O点到AC的距离为5cm。
①请作出液压杆对机械臂的动力的力臂;
②求出此时液压杆为机械臂提供的动力(机械臂质量和所受浮力忽略不计);
(2)这艘机器人潜水艇的总体积为30m3,水舱没有充海水时,总质量4×103kg。该潜艇载水舱的容积至少为多少立方米时,才能在舱中注满水后使潜艇下潜?
(3)该潜艇最大潜水深度30m,潜水艇载水舱中排水泵排水流量为6m3/min,已知水面气压为105Pa,为防止载水舱中的水排不出而不能恢复储备浮力,出现潜航事故,该潜水艇载水舱中排水泵的排水功率至少为多少W?
您最近一年使用:0次
综合题
|
较难
(0.4)
解题方法
【推荐1】以下是小李和小王进行的有关杠杆的综合实践活动。
(1)小李和小王利用刻度均匀的杠杆探究“杠杆的平衡条件”,如图所示。

①实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将杠杆两端的螺母向___________ 调节,使杠杆在不挂钩码时保持水平位置平衡;
②杠杆平衡后,小李在左右两侧分别挂上不同数量的钩码,仔细调节悬挂点的位置使杠杆再次水平位置平衡,如图乙所示,实验中使用的钩码每个重为0.5N。最后记录的数据如下表。
分析表格中的数据得出杠杆的平衡条件是:___________ 。接着他们又做了如图丙所示的实验,当杠杆水平静止时,测力计的示数是___________ N;
(2)小李在实验中突然想到以前学习的三力平衡知识,于是想到杠杆是否也有三个力的平衡问题。带着这个问题,他和小王利用如图丁所示装置,多次实验探究发现此时杠杆平衡条件是

(3)小王利用互联网搜索有关杆秤的信息,再结合以上探究的知识制作了一把如图戊所示的杆秤,这把杆秤的秤砣质量为1kg,“秤杆和秤钩”的总质量为0.5kg,O点为秤纽悬点,D点为秤钩悬点,OD=10cm:
①秤钩上不挂物体,提起秤纽,当秤砣移动到C点时,秤杆刚好水平平衡,则C点就是杆秤的零刻度;测量出OC=4cm,“秤杆和秤钩”的重心距离O点___________ cm:
②秤杆上标注3kg的刻度线距离O点___________ cm。如果在使用中秤砣意外碰掉一小块,质量变为0.8kg,再测真实质量3kg的物体时,称出来的质量为___________ kg。
(1)小李和小王利用刻度均匀的杠杆探究“杠杆的平衡条件”,如图所示。
①实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将杠杆两端的螺母向
②杠杆平衡后,小李在左右两侧分别挂上不同数量的钩码,仔细调节悬挂点的位置使杠杆再次水平位置平衡,如图乙所示,实验中使用的钩码每个重为0.5N。最后记录的数据如下表。
实验次数 | 动力F1/N | 动力臂l1/cm | 阻力F2/N | 阻力臂l2/cm |
1 | 1.0 | 10.0 | 0.5 | 20.0 |
2 | 1.5 | 10.0 | 3.0 | 5.0 |
3 | 2.0 | 20.0 | 1.5 | 26.7 |
(2)小李在实验中突然想到以前学习的三力平衡知识,于是想到杠杆是否也有三个力的平衡问题。带着这个问题,他和小王利用如图丁所示装置,多次实验探究发现此时杠杆平衡条件是
(3)小王利用互联网搜索有关杆秤的信息,再结合以上探究的知识制作了一把如图戊所示的杆秤,这把杆秤的秤砣质量为1kg,“秤杆和秤钩”的总质量为0.5kg,O点为秤纽悬点,D点为秤钩悬点,OD=10cm:
①秤钩上不挂物体,提起秤纽,当秤砣移动到C点时,秤杆刚好水平平衡,则C点就是杆秤的零刻度;测量出OC=4cm,“秤杆和秤钩”的重心距离O点
②秤杆上标注3kg的刻度线距离O点
您最近一年使用:0次
综合题
|
较难
(0.4)
解题方法
【推荐1】《天工开物》记载的一种捣谷用的掎如图1,其简化图如图2,潜的重心在 A 点,用脚在 B 点施加一个力F1使播静止,不计摩擦。

(1)在图2中画出潜的重力G及F1的力臂l1______ 。
(2)根据杠杆的平衡条件______ 可知,此时F1______ G(选填“>”“=”“<”),樁属于______ (选填“省力”“费力”“等臂”)杠杆。
(1)在图2中画出潜的重力G及F1的力臂l1
(2)根据杠杆的平衡条件
您最近一年使用:0次
综合题
|
较难
(0.4)
解题方法
【推荐2】以下是小李和小王进行的有关杠杆的综合实践活动。
(1)小李和小王利用刻度均匀的杠杆探究“杠杆的平衡条件”,如图所示。
①实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将杠杆两端的螺母向___________ 调节,使杠杆在不挂钩码时保持水平位置平衡;
②杠杆平衡后,小李在左右两侧分别挂上不同数量的钩码,仔细调节悬挂点的位置使杠杆再次水平位置平衡,如图乙所示,实验中使用的钩码每个重为0.5N。最后记录的数据如下表。
分析表格中的数据得出杠杆的平衡条件是:___________ 。接着他们又做了如图丙所示的实验,当杠杆水平静止时,测力计的示数是___________ N;
(2)小李在实验中突然想到以前学习的三力平衡知识,于是想到杠杆是否也有三个力的平衡问题。带着这个问题,他和小王利用如图丁所示装置,多次实验探究发现此时杠杆平衡条件是
(3)小王利用互联网搜索有关杆秤的信息,再结合以上探究的知识制作了一把如图戊所示的杆秤,这把杆秤的秤砣质量为1kg,“秤杆和秤钩”的总质量为0.5kg,O点为秤纽悬点,D点为秤钩悬点,OD=10cm:
①秤钩上不挂物体,提起秤纽,当秤砣移动到C点时,秤杆刚好水平平衡,则C点就是杆秤的零刻度;测量出OC=4cm,“秤杆和秤钩”的重心距离O点___________ cm:
②秤杆上标注3kg的刻度线距离O点___________ cm。如果在使用中秤砣意外碰掉一小块,质量变为0.8kg,再测真实质量3kg的物体时,称出来的质量为___________ kg。
(1)小李和小王利用刻度均匀的杠杆探究“杠杆的平衡条件”,如图所示。
①实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将杠杆两端的螺母向
②杠杆平衡后,小李在左右两侧分别挂上不同数量的钩码,仔细调节悬挂点的位置使杠杆再次水平位置平衡,如图乙所示,实验中使用的钩码每个重为0.5N。最后记录的数据如下表。
实验次数 | 动力F1/N | 动力臂l1/cm | 阻力F2/N | 阻力臂l2/cm |
1 | 1.0 | 10.0 | 0.5 | 20.0 |
2 | 1.5 | 10.0 | 3.0 | 5.0 |
3 | 2.0 | 20.0 | 1.5 | 26.7 |
(2)小李在实验中突然想到以前学习的三力平衡知识,于是想到杠杆是否也有三个力的平衡问题。带着这个问题,他和小王利用如图丁所示装置,多次实验探究发现此时杠杆平衡条件是
(3)小王利用互联网搜索有关杆秤的信息,再结合以上探究的知识制作了一把如图戊所示的杆秤,这把杆秤的秤砣质量为1kg,“秤杆和秤钩”的总质量为0.5kg,O点为秤纽悬点,D点为秤钩悬点,OD=10cm:
①秤钩上不挂物体,提起秤纽,当秤砣移动到C点时,秤杆刚好水平平衡,则C点就是杆秤的零刻度;测量出OC=4cm,“秤杆和秤钩”的重心距离O点
②秤杆上标注3kg的刻度线距离O点
您最近一年使用:0次



