小红和小明利用如图所示装置探究杠杆的平衡条件。
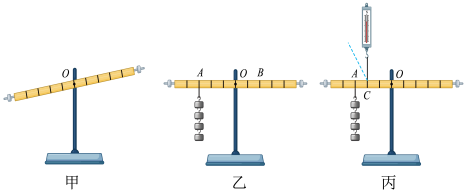
(1)挂钩码前,杠杆在如图甲所示的位置静止,此时杠杆处于______ (选填“平衡”或“非平衡”)状态;
(2)在杠杆两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂,多次实验并把数据记录在表格中。
实验中多次测量的目的是___________ ;小明根据以上数据得出杠杆平衡条件是_________ (公式表示);
(3)杠杆调节平衡后,小红在杠杆上的A点处挂4个钩码,如图乙所示,为使在重新平衡,应在B点挂______ 个钩码。当杠杆平衡后,将A点和B点下方所挂的钩码同时向支点O靠近一格,杠杆会_______ (填“左侧下降”、“右侧下降”或“仍水平平衡”)。
(4)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡,当弹簧测力计在原位置逐渐向左倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将_____ (填“变大”,“变小”或“不变”)。
(1)挂钩码前,杠杆在如图甲所示的位置静止,此时杠杆处于
(2)在杠杆两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂,多次实验并把数据记录在表格中。
次数 | F1/N | l1/cm | F2/N | l2/cm |
1 | 1 | 10 | 2 | 5 |
2 | 2 | 10 | 1 | 20 |
3 | 2 | 15 | 3 | 10 |
(3)杠杆调节平衡后,小红在杠杆上的A点处挂4个钩码,如图乙所示,为使在重新平衡,应在B点挂
(4)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡,当弹簧测力计在原位置逐渐向左倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将
更新时间:2022-12-07 15:09:18
|
相似题推荐
实验题
|
适中
(0.65)
解题方法
【推荐1】物理实验合作小组利用如图所示的装置“探究杠杆的平衡条件”,组装好实验器材后发现杠杆的状态如图甲所示。

(1)若要使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向
(2)如图乙所示,在A点挂有4个钩码,为使杠杆在水平位置平衡,应在B点挂
(3)测量多次,分析实验数据后,有同学认为:根据一次实验数据,即可得出杠杆的平衡条件,你认为他的做法是
(4)小组有的同学利用图丙装置探究,发现杠杆平衡时,所测得相关数据关系与杠杆平衡条件不相符,你认为所致的原因是
(5)实验过程中,同学们发现利用图丁的方式悬挂钩码,也能使杠杆在水平位置平衡,但老师不建议同学们采用这种方式,你认为老师建议的理由是
您最近一年使用:0次
实验题
|
适中
(0.65)
解题方法
【推荐2】如图所示,小明用轻质杠杆进行“探究杠杆的平衡条件”的实验。

(1)如图甲,实验装置静止在桌上,此时杠杆_____ (选填“是”或“不是”)处于平衡状态。为了调节杠杆在水平位置平衡,右侧的平衡螺母向 _____ 边调,直到杠杆在水平位置平衡,目的是 ____________________ ;
(2)如图乙,杠杆上刻度均匀,在A点挂3个钩码,应在B点挂_____ 个相同的钩码;当杠杆平衡后将A、B两点下方同时取下一个钩码,则杠杆 _____ 端下沉;
(3)如图丙,取下B点的钩码,用弹簧测力计在B点向下拉杠杆,当弹簧测力计从b位置转动到a位置时,弹簧测力计的示数F会逐渐_______ 。F与其力臂l的乘积大小变化情况是 _______ 。(均选填“变大”、“变小”或“不变”)
(1)如图甲,实验装置静止在桌上,此时杠杆
(2)如图乙,杠杆上刻度均匀,在A点挂3个钩码,应在B点挂
(3)如图丙,取下B点的钩码,用弹簧测力计在B点向下拉杠杆,当弹簧测力计从b位置转动到a位置时,弹簧测力计的示数F会逐渐
您最近一年使用:0次
实验题
|
适中
(0.65)
解题方法
【推荐3】在“研究杠杆平衡条件”实验中:

(1)实验前出现图甲所示情况,为了使杠杆在水平位置平衡,应将杠杆右端的螺母向________ 调。(填“左”或“右”)
(2)实验过程中出现图乙所示情况,为了使杠杆在水平位置平衡,这时应将右边的钩码向________ (填“左”或“右”)移动________ 格。
(3)图乙中杠杆水平平衡后,在左右两边钩码下同时加一个相同的钩码,这时杠杆将__________ 。(填“仍然保持平衡”、“顺时针转动”或“逆时针转动”)
(1)实验前出现图甲所示情况,为了使杠杆在水平位置平衡,应将杠杆右端的螺母向
(2)实验过程中出现图乙所示情况,为了使杠杆在水平位置平衡,这时应将右边的钩码向
(3)图乙中杠杆水平平衡后,在左右两边钩码下同时加一个相同的钩码,这时杠杆将
您最近一年使用:0次
实验题
|
适中
(0.65)
【推荐1】小华在做“探究杠杆平衡条件”实验的装置如图,杠杆上相邻刻线间的距离相等。

(1)杠杆在图甲的位置静止时,________ (选填“是”或“不是”)处于平衡状态的。
(2)为使杠杆在水平位置平衡,应将平衡螺母向________ (选填“左”或“右”)端调节,其目的是为了消除杠杆自重对实验影响和________ 。
(3)如图乙,杠杆在水平位置平衡后,在A点挂两个钩码,每个钩码重0.5N,在B点竖直向下拉弹簧测力计,仍使杠杆水平位置平衡,此时弹簧测力计的示数应为_________ N。当弹簧测力计改为斜拉时,再次使杠杆水平位置平衡,则弹簧测力计的示数将________ (选填“变大”、“变小”或“不变”)。
(4)小华改变钩码的个数和位置进行了多次实验,其目的是__________ 。
(5)拓展:若B点的弹簧测力计量程为0-15N,沿竖直方向拉动弹簧测力计,则在保持杠杆平衡的条件下,A点理论上最多可以挂______ N的重物。
(1)杠杆在图甲的位置静止时,
(2)为使杠杆在水平位置平衡,应将平衡螺母向
(3)如图乙,杠杆在水平位置平衡后,在A点挂两个钩码,每个钩码重0.5N,在B点竖直向下拉弹簧测力计,仍使杠杆水平位置平衡,此时弹簧测力计的示数应为
(4)小华改变钩码的个数和位置进行了多次实验,其目的是
(5)拓展:若B点的弹簧测力计量程为0-15N,沿竖直方向拉动弹簧测力计,则在保持杠杆平衡的条件下,A点理论上最多可以挂
您最近一年使用:0次
实验题
|
适中
(0.65)
解题方法
【推荐2】在“探究杠杆的平衡条件”实验中。安装好杠杆,发现杠杆左端偏高,此时需要将平衡螺母向________ 调节,使之在水平位置平衡。如图所示,在杠杆左侧20cm处挂了三个钩码,要使杠杆在水平位置平衡,可以在杠杆右侧30cm处挂________ 个钩码。若将实验器材静止放在斜面上,是否可以完成以上操作过程?________

您最近一年使用:0次
实验题
|
适中
(0.65)
解题方法
【推荐3】在做“杠杆平衡条件”的实验时,所用到的实验器材有:杠杆、铁架台和若干个重为1N的钩码,如图所示。

(1)在图甲中,要使杠杆水平平衡,应将右边的平衡螺母适当往_______ (选填“左边”或“右边”)调,杠杆上标有刻度,目的在于方便测量_______ ;
(2)杠杆调节好后,先后进行了三次实验,情景如图乙、丙、丁所示,以两边钩码的重力分别为动力F1和阻力F2,对应的动力臂为l1和阻力臂为l2,由此可得杠杆的平衡条件为_________ ;
(3)实验中进行多次实验的目的是______________ ;
(4)若将图丁中的杠杆两边各减少一个钩码,则杠杆将向_______ (选填“左边”或“右边”)下沉。若在图丁左边增加3个钩码,则右边应增加_______ 个钩码。
(1)在图甲中,要使杠杆水平平衡,应将右边的平衡螺母适当往
(2)杠杆调节好后,先后进行了三次实验,情景如图乙、丙、丁所示,以两边钩码的重力分别为动力F1和阻力F2,对应的动力臂为l1和阻力臂为l2,由此可得杠杆的平衡条件为
(3)实验中进行多次实验的目的是
(4)若将图丁中的杠杆两边各减少一个钩码,则杠杆将向
您最近一年使用:0次
实验题
|
适中
(0.65)
解题方法
【推荐1】小明利用杠杆做了以下实验,实验时使用的每个钩码的质量均相等,杠杆上相邻刻度线间的距离相等;请回答下列问题:

(1)如图甲所示,将杠杆中点置于支架上,当杠杆静止时,发现杠杆的左端下沉,若想使杠杆在水平位置平衡,应将杠杆的平衡螺母向______ 调节;使杠杆在水平位置平衡的主要目的是 ______ ;
(2)当杠杆在水平位置平衡时,在A点悬挂2个钩码,要使杠杆在水平位置再次平衡,需在B点悬挂______ 个钩码;此时若在A、B两点再各增加1个钩码,杠杆将 ______ (填“不动”、“顺时针旋转”或“逆时针旋转”);
(3)如图乙所示,小明在A、C两点分别悬挂等重的载物盘,制作了一个天平,左盘盛放物体,右盘加减砝码,此天平是利用了______ 的原理制作而成的;
(4)小明正确使用自制天平称量物体的质量时,假如支点O因某种原因向右偏移,则测量值______ (选填“大于”、“等于”或“小于”)真实值。
(1)如图甲所示,将杠杆中点置于支架上,当杠杆静止时,发现杠杆的左端下沉,若想使杠杆在水平位置平衡,应将杠杆的平衡螺母向
(2)当杠杆在水平位置平衡时,在A点悬挂2个钩码,要使杠杆在水平位置再次平衡,需在B点悬挂
(3)如图乙所示,小明在A、C两点分别悬挂等重的载物盘,制作了一个天平,左盘盛放物体,右盘加减砝码,此天平是利用了
(4)小明正确使用自制天平称量物体的质量时,假如支点O因某种原因向右偏移,则测量值
您最近一年使用:0次
实验题
|
适中
(0.65)
解题方法
【推荐2】小明利用如图所示的实验装置“探究杠杆的平衡条件”。

(1)轻质杠杆静止时如图甲所示,此时杠杆处于__________ (选填“平衡”或“非平衡”)状态;可将平衡螺母向__________ (选填“左”或“右”)调节,使其在水平位置平衡,这样操作的目的是便于测量__________ ;
(2)在探究过程中,需要进行多次实验的目的是__________ (选填序号);
A.求平均值,减小误差
B.避免偶然性,寻找普遍规律
(3)小明多次实验并记录数据如表,总结数据得出杠杆的平衡条件:__________ ;
(4)第2次实验所挂钩码的个数和位置如图乙所示,此时将两侧所挂的钩码同时向支点O靠近一格,杠杆会__________ (选填“左侧下降”、“右侧下降”或“仍水平平衡”);
(5)如图丙所示,用弹簧测力计在A处竖直向上拉,使杠杆在水平位置平衡,在弹簧测力计逐渐向左倾斜到虚线位置的过程中,保持杠杆在水平位置平衡,则弹簧测力计的示数将__________ (选填“变大”、“变小”或“不变”)。
(1)轻质杠杆静止时如图甲所示,此时杠杆处于
(2)在探究过程中,需要进行多次实验的目的是
A.求平均值,减小误差
B.避免偶然性,寻找普遍规律
(3)小明多次实验并记录数据如表,总结数据得出杠杆的平衡条件:
次数 | 动力F1/N | 动力臂l1/m | 阻力F2/N | 阻力臂l2/m |
1 | 1 | 0.1 | 2 | 0.05 |
2 | 2 | 0.15 | 1.5 | 0.2 |
3 | 3 | 0.05 | 1.5 | 0.1 |
(5)如图丙所示,用弹簧测力计在A处竖直向上拉,使杠杆在水平位置平衡,在弹簧测力计逐渐向左倾斜到虚线位置的过程中,保持杠杆在水平位置平衡,则弹簧测力计的示数将
您最近一年使用:0次
实验题
|
适中
(0.65)
解题方法
【推荐3】物理实验小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件。
(1)如下图所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向___________ (选填“左”或“右”)移动,将杠杆调节水平位置平衡是为了方便测量___________
(2)实验中测得的数据如表中所示,表格中漏填的数据为___________ N。
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”。这个结论与杠杆的平衡条件不符,原因是实验过程中___________ (填字母)
A、没有改变力的大小 B、没有改变力的方向
C、没有改变力的作用点 D、实验次数太少,结论具有偶然性

(1)如下图所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向
(2)实验中测得的数据如表中所示,表格中漏填的数据为
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”。这个结论与杠杆的平衡条件不符,原因是实验过程中
A、没有改变力的大小 B、没有改变力的方向
C、没有改变力的作用点 D、实验次数太少,结论具有偶然性
测量 序号 | 动力 F1/N | 动力臂 L1/cm | 阻力 F2/N | 阻力臂 L2/cm |
① | 1 | 20 | 2 | 10 |
② | 2 | 15 | 1.5 | 20 |
③ | 3 | 5 | 15 |
您最近一年使用:0次


