阅读下列信息,完成下列问题:
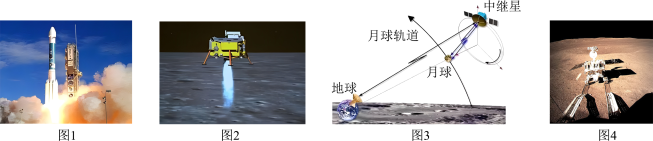
如图1所示,2018年12月8日2时23分,长征三号乙运载火箭成功发射嫦娥四号探测器。2019年1月3日上午,着陆距离月面100m时,推进器开启让着陆器处于悬停状态(如图2),然后激光和摄像头进行探测,分析最佳的着陆位置,1月3日上午10点26分成功在月球背面软着陆,拍下世界首张月背影像图。由于地球上的通信信号无法穿透月球抵达其背面,这就需要鹊桥中继卫星的帮助来实现数据传输,完成地面测控任务,如图3所示。已知物体在月球上受到的重力只有地球上的六分之一,回答下列问题:
(1)火箭上和月球探测器上均安装有摄像机和照相机拍摄记录飞行过程以及月面照片,照相机和摄像机的镜头相当于___________ 镜,能成倒立、缩小的___________ 像;
(2)总质量约为 的嫦娥四号探测器在距月面100m悬停状态时相对月球是
的嫦娥四号探测器在距月面100m悬停状态时相对月球是___________ 的(选填“运动”或“静止”),此时探测器受到的合力为___________ ;
(3)月球车与着陆器分离的过程,着陆器上的摄像机拍摄到的视频没有声音,原因是___________ ;
(4)我国自行研究设计的玉兔二号月球车整车质量只有140kg,在月球上受到的重力约为___________ N(取整数),中继卫星距离地球约44.5万公里,距离月球约6.5万公里,从地球发出的控制指令以光的传播速度通过中继卫星传到月球背面的探测器需要的时间大约是___________ s(不考虑信号在中继星上的延迟);
(5)发挥你的想象,在你学过的实验中,在月球上不能做的是___________ ,在月球上能够做是___________ 。(各写出一种即可)
如图1所示,2018年12月8日2时23分,长征三号乙运载火箭成功发射嫦娥四号探测器。2019年1月3日上午,着陆距离月面100m时,推进器开启让着陆器处于悬停状态(如图2),然后激光和摄像头进行探测,分析最佳的着陆位置,1月3日上午10点26分成功在月球背面软着陆,拍下世界首张月背影像图。由于地球上的通信信号无法穿透月球抵达其背面,这就需要鹊桥中继卫星的帮助来实现数据传输,完成地面测控任务,如图3所示。已知物体在月球上受到的重力只有地球上的六分之一,回答下列问题:
(1)火箭上和月球探测器上均安装有摄像机和照相机拍摄记录飞行过程以及月面照片,照相机和摄像机的镜头相当于
(2)总质量约为
的嫦娥四号探测器在距月面100m悬停状态时相对月球是(3)月球车与着陆器分离的过程,着陆器上的摄像机拍摄到的视频没有声音,原因是
(4)我国自行研究设计的玉兔二号月球车整车质量只有140kg,在月球上受到的重力约为
(5)发挥你的想象,在你学过的实验中,在月球上不能做的是
更新时间:2023-08-07 23:05:45
|
相似题推荐
【推荐1】阅读《嫦娥四号的“三双眼睛”》回答题。
2019年1月3日,嫦娥四号月球探测器成功登陆月球,成为人类历史上首个在月球背面实现软着陆的月球探测器。嫦娥四号与嫦娥三号一样,仍由着陆器和巡视器(又叫月球车)组成。嫦娥四号探测任务的成功依赖于探测器上的三大光学装备-激光测距敏感器、激光三维成像敏感器和红外成像光谱仪。
其中,激光测距敏感器和激光三维成像敏感器是嫦娥四号落月过程中必不可少的“眼睛”,堪称确保探测器安全着陆最关键、最核心的技术装备。在嫦娥四号着陆器距离月面15千米高度时,激光测距敏感器开始工作。每秒向月面发射两次激光脉冲,在月球表面接近真空的环境下,激光几乎可以毫无损失的到达月球表面。激光测距敏感器通过测量月面回波脉冲信号与激光发射脉冲信号的时间间隔、获得嫦娥四号着陆器相对于月面的精确距离。当嫦娥四号到达距月面100米的悬停位置时,激光三维成像敏感器开始工作;采集月面的三维图像,将高于月面15厘米的石头或低于月面15厘米的坑识别出来,确保探测器降落在安全区域。如此精细的扫描成像工作,在短短几秒内就完成了。
此外,嫦娥四号携带的月球车(玉兔二号)装载了“红外眼”一红外成像光谱仪。其工作原理是将一束包含不同频率的红外线照射到月面物质上,当物质吸收了一定频率的红外线后,相应频率的射线被减弱。通过比较红外线被吸收的情况(吸收光谱)分析出月球表面物质的成分。
激光测距敏感器、激光三维成像敏感器和红外成像光谱仪共同构成了嫦娥四号的“三双眼睛”,助力嫦娥四号高效精准的完成月球探测任务。
请根据上述材料,回答下列问题:
(1)在三大光学装备中,能够识别月球表面平整程度,确保探测器降落在安全区域的是_________ 。
(2)在嫦娥四号落月过程中,激光测距敏感器开始工作时,向月面发射一束激光脉冲,_________ s后可以接收到该激光脉冲的月面回波信号。
(3)利用超声波回声测距也是一种重要的测距方式。嫦娥四号的落月过程_________ (选填:“能”或“不能”)使用回声测距。
(4)红外成像光谱仪是利用红外线工作的光学装备,请你再列举一个应用红外线的实例:________ 。
嫦娥四号的“三双眼睛”
2019年1月3日,嫦娥四号月球探测器成功登陆月球,成为人类历史上首个在月球背面实现软着陆的月球探测器。嫦娥四号与嫦娥三号一样,仍由着陆器和巡视器(又叫月球车)组成。嫦娥四号探测任务的成功依赖于探测器上的三大光学装备-激光测距敏感器、激光三维成像敏感器和红外成像光谱仪。
其中,激光测距敏感器和激光三维成像敏感器是嫦娥四号落月过程中必不可少的“眼睛”,堪称确保探测器安全着陆最关键、最核心的技术装备。在嫦娥四号着陆器距离月面15千米高度时,激光测距敏感器开始工作。每秒向月面发射两次激光脉冲,在月球表面接近真空的环境下,激光几乎可以毫无损失的到达月球表面。激光测距敏感器通过测量月面回波脉冲信号与激光发射脉冲信号的时间间隔、获得嫦娥四号着陆器相对于月面的精确距离。当嫦娥四号到达距月面100米的悬停位置时,激光三维成像敏感器开始工作;采集月面的三维图像,将高于月面15厘米的石头或低于月面15厘米的坑识别出来,确保探测器降落在安全区域。如此精细的扫描成像工作,在短短几秒内就完成了。
此外,嫦娥四号携带的月球车(玉兔二号)装载了“红外眼”一红外成像光谱仪。其工作原理是将一束包含不同频率的红外线照射到月面物质上,当物质吸收了一定频率的红外线后,相应频率的射线被减弱。通过比较红外线被吸收的情况(吸收光谱)分析出月球表面物质的成分。
激光测距敏感器、激光三维成像敏感器和红外成像光谱仪共同构成了嫦娥四号的“三双眼睛”,助力嫦娥四号高效精准的完成月球探测任务。
请根据上述材料,回答下列问题:
(1)在三大光学装备中,能够识别月球表面平整程度,确保探测器降落在安全区域的是
(2)在嫦娥四号落月过程中,激光测距敏感器开始工作时,向月面发射一束激光脉冲,
(3)利用超声波回声测距也是一种重要的测距方式。嫦娥四号的落月过程
(4)红外成像光谱仪是利用红外线工作的光学装备,请你再列举一个应用红外线的实例:
您最近一年使用:0次
【推荐2】阅读短文“汽车刹车之后”,回答问题:
现代社会汽车大量增加,发生交通事故的一个重要原因是遇到意外情况时车不能立即停止。司机从看到情况到肌肉动作操纵制动器来刹车需要一段时间,这段时间叫反应时间;在这段时间内汽车要保持原速前进一段距离,叫反应距离,从操纵制动器刹车,到车停下来,汽车又要前进一段距离,这段距离叫制动距离。下面是一个机警的司机驾驶一辆保养很好的汽车在干燥的水平公路是以不同速度行驶时,测得的反应距离和制动距离。
(1)汽车在正常行驶时,车轮与地面间的摩擦是_______ (选填“滑动”或“滚动”)摩擦,刹车后,由于_______ ,汽车还会继续向前滑行一段距离;
(2)根据上表数据,当车速为40km/h时,该司机的反应时间大约是_______ s;
(3)分析上表数据,可知影响汽车制动距离的主要因素是_______ ;
(4)为了提醒司机朋友在雨雪天气里注意行车安全,在高速公路旁设置了“雨雪路滑,减速慢行”的警示牌,请简要说明这句话的物理道理_______ 。
现代社会汽车大量增加,发生交通事故的一个重要原因是遇到意外情况时车不能立即停止。司机从看到情况到肌肉动作操纵制动器来刹车需要一段时间,这段时间叫反应时间;在这段时间内汽车要保持原速前进一段距离,叫反应距离,从操纵制动器刹车,到车停下来,汽车又要前进一段距离,这段距离叫制动距离。下面是一个机警的司机驾驶一辆保养很好的汽车在干燥的水平公路是以不同速度行驶时,测得的反应距离和制动距离。
| 速度(km/h) | 40 | 50 | 60 | 80 | 100 |
| 反应距离(m) | 7 | 9 | 11 | 15 | 19 |
| 制动距离(m) | 8 | 13 | 20 | 34 | 54 |
(2)根据上表数据,当车速为40km/h时,该司机的反应时间大约是
(3)分析上表数据,可知影响汽车制动距离的主要因素是
(4)为了提醒司机朋友在雨雪天气里注意行车安全,在高速公路旁设置了“雨雪路滑,减速慢行”的警示牌,请简要说明这句话的物理道理
您最近一年使用:0次
科普阅读题
|
适中
(0.65)
解题方法
【推荐3】 阅读短文,回答问题。
智能手机
智能手机具有独立的操作系统,独立的运行空间,可以由用户自行安装软件、游戏、导航等程序,并可以通过移动通讯网络来实现无线接入。
很多同学喜欢用手机上网,用耳机听音乐,若使用不当会对我们的身体造成伤害。眼睛长时间近距离靠近手机屏幕,使眼睛内的睫状肌、晶状体长期处于绷紧状态,容易患近视眼;长期使用耳机听音乐容易对耳朵造成伤害。
小明在智能手机上安装了一些应用软件后,打开手机中的北斗导航系统,可以通过卫星精确定位手机所在的位置,可以根据位置的移动进行测速、测距、导航等手机前后有两个摄像头,后置摄像头是透镜组合,相当于焦距为 2.1cm 的凸透镜,前置摄像头利用应用软件,可以实现自拍和照镜子的功能。
新款华为 Mate60 手机带有卫星通讯功能,该款手机能够直接与相距 36000km 同步通信卫星进行信息交换通信,具有覆盖范围广,通信稳定的优点,即使在偏远山区、沙漠也能保持稳定的通信。
跑步记录 用时 1h6min0s 平均配速 06′40″ 热量 611kcal |

(1)下列关于手机的说法中,正确的是
A.增大音量是增大声音的音调
B.卫星是通过超声波对手机进行定位的
C.利用手机软件照镜子,看到自己的完整脸蛋是缩小的像
(2)如图是生活中常用的二维码,用手机扫描二维码时,是利用
(3)长时间近距离看手机容易造成眼睛晶状体变
(4)如表所示,小明打开手机中的跑步软件记录了一次跑步数据,图中“06′40″” 表示时间为 6min40s。“平均配速”是物体每运动 1km 需要的时间,则小明此次跑步的平均速度为
您最近一年使用:0次

科普阅读题
|
适中
(0.65)
【推荐1】阅读短文,回答问题
嫦娥四号探测器由着陆器与巡视器组成,巡视器被命名为“玉兔二号”.作为世界首个在月球背面软着陆和巡视探测的航天器,其主要任务是着陆月球表面,继续更深层次更加全面地科学探测月球地质、资源等方面的信息,完善月球的档案资料.
为什么我们总看不到月球背面呢?月球围绕地球公转的同时也在自转,地球和月球之间存在相互作用的引力,并且月球背向地球的半球离地球远,受到地球的引力小.如果月球自转周期与绕地球公转周期不相等,那么月球上同一部分与地球距离会发生变化,使其所受地球引力发生变化.这导致月球不同岩石之间产生摩擦,逐渐减慢自转的速度,最终使得月球自转与绕地球公转的周期相同,即月球被地球引力“潮汐锁定”.由于“潮汐锁定”,使得月球自转的周期等于它绕地球公转的周期,因此总是同一面朝向地球.
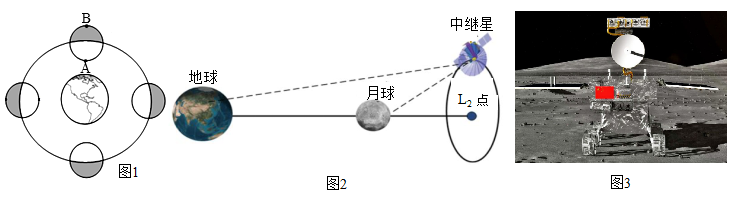
为了解决探测器到达月球背面后没有信号的问题,2018年5月21日,科学家把一颗叫“鹊桥”的中继卫星放在了地球和月球连线外侧的“拉格朗日点”(L2)上,在这个点上,中继卫星在地球和月球共同的引力作用下围绕地球运动,且始终悬停在月球背面的上空.这颗卫星负责地球与着陆器、月球车的通讯,为我们传回嫦娥四号的观测数据,有了这颗卫星做通讯保障,探测器才敢在月球背面着陆,这也是人类首次.
2018年12月8日,嫦娥四号探测器在西昌卫星发射中心由长征三号乙运载火箭成功发射入轨,之后经过地月转移、近月制动、环月飞行、降轨,最后着陆月球.
2019年1月3日,10时15分,嫦娥四号迎来制动时刻,7500牛发动机开机,动力下降开始;10时21分,降落相机开机,开始抓拍落月全过程;10时25分,嫦娥四号转入悬停模式,随着现场工作人员一声令下,嫦娥四号探测器从距离月面15公里处开始实施动力下降,探测器的速度逐步从相对月球1.7公里每秒降为零.经历了近700秒的落月过程,嫦娥四号探测器成功在月球背面南极﹣艾特肯盆地冯•卡门撞击坑的预选区着陆.
2019年1月11日,嫦娥四号着陆器与玉兔二号巡视器完成两器互拍,达到工程既定目标,标志着嫦娥四号任务圆满成功.
嫦娥四号采取新的能源供给方式﹣﹣同位素温差发电与热电综合利用技术结合,也就是两面太阳翼收集的太阳能和月球车上的同位素热源两种能源供给.据科学家介绍,“嫦娥四号”主要还是太阳能板供电,使用的核电源功率还比较小,仅2瓦,与电脑上的USB接口供电能力差不多,仅在月夜采集温度的时候采用.
(1)为了更直观地说明为什么我们总看不到月球的背面,可以构建月球绕地球运行过程的动态模型,构建这个模型应抓住的关键是_____ .“鹊桥”卫星是靠 _____ 传递信息的.
(2)绕月运动时的嫦娥四号探测器受到的是_____ (选填平衡力作用,非平衡力作用),其运动状态 _____ (选填变化着,不变).
(3)月球上没有空气,不能使用降落伞降落,只能使用反推力火箭产生的阻力实现探测器软着陆,这说明力能改变物体的_____ ,从悬停经700秒落月过程中,嫦娥四号探测器作 _____ (选填加速,减速,匀速)运动.
(4)嫦娥四号着陆器与玉兔二号巡视器上装有摄像机和照相机,摄像机和照相机的镜头相当于_____ (选填凸透镜,凹透镜,平面镜),能成倒立、缩小的 _____ (选填实像,虚像).
(5)嫦娥四号探测器到达月球表面后,展开太阳能电池帆板,对着太阳方向,太阳能帆板供电时,将_____ 能转换为 _____ 能.
嫦娥四号探测器
嫦娥四号探测器由着陆器与巡视器组成,巡视器被命名为“玉兔二号”.作为世界首个在月球背面软着陆和巡视探测的航天器,其主要任务是着陆月球表面,继续更深层次更加全面地科学探测月球地质、资源等方面的信息,完善月球的档案资料.
为什么我们总看不到月球背面呢?月球围绕地球公转的同时也在自转,地球和月球之间存在相互作用的引力,并且月球背向地球的半球离地球远,受到地球的引力小.如果月球自转周期与绕地球公转周期不相等,那么月球上同一部分与地球距离会发生变化,使其所受地球引力发生变化.这导致月球不同岩石之间产生摩擦,逐渐减慢自转的速度,最终使得月球自转与绕地球公转的周期相同,即月球被地球引力“潮汐锁定”.由于“潮汐锁定”,使得月球自转的周期等于它绕地球公转的周期,因此总是同一面朝向地球.
为了解决探测器到达月球背面后没有信号的问题,2018年5月21日,科学家把一颗叫“鹊桥”的中继卫星放在了地球和月球连线外侧的“拉格朗日点”(L2)上,在这个点上,中继卫星在地球和月球共同的引力作用下围绕地球运动,且始终悬停在月球背面的上空.这颗卫星负责地球与着陆器、月球车的通讯,为我们传回嫦娥四号的观测数据,有了这颗卫星做通讯保障,探测器才敢在月球背面着陆,这也是人类首次.
2018年12月8日,嫦娥四号探测器在西昌卫星发射中心由长征三号乙运载火箭成功发射入轨,之后经过地月转移、近月制动、环月飞行、降轨,最后着陆月球.
2019年1月3日,10时15分,嫦娥四号迎来制动时刻,7500牛发动机开机,动力下降开始;10时21分,降落相机开机,开始抓拍落月全过程;10时25分,嫦娥四号转入悬停模式,随着现场工作人员一声令下,嫦娥四号探测器从距离月面15公里处开始实施动力下降,探测器的速度逐步从相对月球1.7公里每秒降为零.经历了近700秒的落月过程,嫦娥四号探测器成功在月球背面南极﹣艾特肯盆地冯•卡门撞击坑的预选区着陆.
2019年1月11日,嫦娥四号着陆器与玉兔二号巡视器完成两器互拍,达到工程既定目标,标志着嫦娥四号任务圆满成功.
嫦娥四号采取新的能源供给方式﹣﹣同位素温差发电与热电综合利用技术结合,也就是两面太阳翼收集的太阳能和月球车上的同位素热源两种能源供给.据科学家介绍,“嫦娥四号”主要还是太阳能板供电,使用的核电源功率还比较小,仅2瓦,与电脑上的USB接口供电能力差不多,仅在月夜采集温度的时候采用.
(1)为了更直观地说明为什么我们总看不到月球的背面,可以构建月球绕地球运行过程的动态模型,构建这个模型应抓住的关键是
(2)绕月运动时的嫦娥四号探测器受到的是
(3)月球上没有空气,不能使用降落伞降落,只能使用反推力火箭产生的阻力实现探测器软着陆,这说明力能改变物体的
(4)嫦娥四号着陆器与玉兔二号巡视器上装有摄像机和照相机,摄像机和照相机的镜头相当于
(5)嫦娥四号探测器到达月球表面后,展开太阳能电池帆板,对着太阳方向,太阳能帆板供电时,将
您最近一年使用:0次
科普阅读题
|
适中
(0.65)
【推荐2】阅读短文,回答问题。
如图是某款智能防疫机器人,具有自主测温、摄像、避障、消毒、咨询宣导等功能,在医疗机构、交通枢纽等众多场所的疫情防控中发挥重要作用,为防疫人员减负增效。利用镜头可将人体辐射的红外线会聚到探测器上,通过处理系统转变为热图像,实现对人群的体温检测,当发现超温人员时,系统会自动语音报警,并在显示屏上用红色框标注人的脸部,机器人把实时拍摄的画面信息通过网络传输到监控中心。
机器人在运动过程中可发射,接收超声波(或激光)来侦测障碍物信息巧妙避障。当感知到前方有障碍物时,机器人会依靠减速器自动减速,并重新调整行驶路线。

(1)机器人语音报警说明声音可传递______ ,该机器人的摄像头的成像原理与我们生活中的______ (选填“照相机”、“投影仪”或“放大镜”)的成像原理相同。
(2)下列关于机器人的说法中,错误的是______ 。
A.机器人发出的超声波是人耳听不到的声音
B.当被拍摄的人远离机器人镜头时,人经镜头成的像会变大
C.机器人发现体温39℃的人会自动语音报警并识别
D.监控中心屏幕上的彩色画面是由红、绿、蓝三种色光混合而成
(3)机器人在行进过程中遇到玻璃等透明障碍物时利用______ (选填“超声波”或“激光”)才能较好地感知到障碍物;当机器人靠近玻璃时,它在玻璃中所成的像的大小将______ (选填“变大”、“不变”或“变小”)。
(4)智能机器人底盘呈正方形,边长为60cm,工作时的行走速度约为1m/s,要对一个长6.6m、宽3.6m的空房间进行消毒,它沿3.6m的宽边从一侧走到另一侧需要______ s。
智能机器人
如图是某款智能防疫机器人,具有自主测温、摄像、避障、消毒、咨询宣导等功能,在医疗机构、交通枢纽等众多场所的疫情防控中发挥重要作用,为防疫人员减负增效。利用镜头可将人体辐射的红外线会聚到探测器上,通过处理系统转变为热图像,实现对人群的体温检测,当发现超温人员时,系统会自动语音报警,并在显示屏上用红色框标注人的脸部,机器人把实时拍摄的画面信息通过网络传输到监控中心。
机器人在运动过程中可发射,接收超声波(或激光)来侦测障碍物信息巧妙避障。当感知到前方有障碍物时,机器人会依靠减速器自动减速,并重新调整行驶路线。
(1)机器人语音报警说明声音可传递
(2)下列关于机器人的说法中,错误的是
A.机器人发出的超声波是人耳听不到的声音
B.当被拍摄的人远离机器人镜头时,人经镜头成的像会变大
C.机器人发现体温39℃的人会自动语音报警并识别
D.监控中心屏幕上的彩色画面是由红、绿、蓝三种色光混合而成
(3)机器人在行进过程中遇到玻璃等透明障碍物时利用
(4)智能机器人底盘呈正方形,边长为60cm,工作时的行走速度约为1m/s,要对一个长6.6m、宽3.6m的空房间进行消毒,它沿3.6m的宽边从一侧走到另一侧需要
您最近一年使用:0次
科普阅读题
|
适中
(0.65)
名校
解题方法
【推荐3】阅读短文,回答问题:
黑龙江省已正式启用了高速公路机动车区间测速系统,实现了由“定点测速”向“区间测速”的转换,定点测速是指在道路上的一个固定位置布设监控点,测出汽车经过该监控点时的行驶速度,比较该行驶速度与限速标准判断是否超速,若行驶速度超过限定速度,将实时抓拍,作为处罚的证据,区间测速是在同一路程上布设两个相邻的监控点,根据车辆通过前后两个监控点的时间来计算车辆在该路段上的平均行驶速度,并依据该路段上的限速标准判定车辆是否超速,比如,某高速路段两个测速点之间的距离是120公里,该路段限速120km/h,车辆如果在1小时内跑完,那它就超速了,《道路交通安全法》规定车速超过规定时速的10%以内,暂不处罚,只给予警告,若超过规定时速的10%以上,将会根据超速的程度受到不同的处罚。
区间测速系统通过在监控点架设摄像机监控抓拍,对监测区域内所通行的车辆进行实时监控、抓拍。道路上的LED屏幕还对违法车辆信息实时发布,区间测速采取计算平均车速的方法来检测车辆是否超速,更加科学公正。
(1)某“定点测速”监控点限速100km/h,若汽车行驶速度30m/s经过该监控点,该汽车________ (选填“超速”或“不超速”);
(2)测速和拍照装置中,拍照所用的摄像机的镜头是一个________ (选填“凸”或“凹”)透镜;
(3)根据文章,关于区间测速,被认定为超速的理解正确的是________ ;
A.以汽车经过前一个监控点时的速度认定
B.以汽车经过后一个监控点时的速度认定
C.以汽车经过两个监控点之间的路段的平均速度超过限定值认定
(4)下列物体中不属于光源的是________ ;
A.亮着的汽车尾灯 B.发光的LED屏
C.拍照时闪光的灯 D.交警的反光制服
(5)在区间测速的两个监控点相距40km,该路段限速120km/h,某汽车通过该路段前一个监控点的时间是10:30,通过后一个监控点的时间是10:49,经过测速路段的时间为________ min,这辆车________ (选填“会”或“不会”)受到处罚。
高速公路区间测速
黑龙江省已正式启用了高速公路机动车区间测速系统,实现了由“定点测速”向“区间测速”的转换,定点测速是指在道路上的一个固定位置布设监控点,测出汽车经过该监控点时的行驶速度,比较该行驶速度与限速标准判断是否超速,若行驶速度超过限定速度,将实时抓拍,作为处罚的证据,区间测速是在同一路程上布设两个相邻的监控点,根据车辆通过前后两个监控点的时间来计算车辆在该路段上的平均行驶速度,并依据该路段上的限速标准判定车辆是否超速,比如,某高速路段两个测速点之间的距离是120公里,该路段限速120km/h,车辆如果在1小时内跑完,那它就超速了,《道路交通安全法》规定车速超过规定时速的10%以内,暂不处罚,只给予警告,若超过规定时速的10%以上,将会根据超速的程度受到不同的处罚。
区间测速系统通过在监控点架设摄像机监控抓拍,对监测区域内所通行的车辆进行实时监控、抓拍。道路上的LED屏幕还对违法车辆信息实时发布,区间测速采取计算平均车速的方法来检测车辆是否超速,更加科学公正。
(1)某“定点测速”监控点限速100km/h,若汽车行驶速度30m/s经过该监控点,该汽车
(2)测速和拍照装置中,拍照所用的摄像机的镜头是一个
(3)根据文章,关于区间测速,被认定为超速的理解正确的是
A.以汽车经过前一个监控点时的速度认定
B.以汽车经过后一个监控点时的速度认定
C.以汽车经过两个监控点之间的路段的平均速度超过限定值认定
(4)下列物体中不属于光源的是
A.亮着的汽车尾灯 B.发光的LED屏
C.拍照时闪光的灯 D.交警的反光制服
(5)在区间测速的两个监控点相距40km,该路段限速120km/h,某汽车通过该路段前一个监控点的时间是10:30,通过后一个监控点的时间是10:49,经过测速路段的时间为
您最近一年使用:0次
【推荐1】阅读短文,回答问题。
传统指纹识别TouchID已成为智能手机的标配。随着黑科技超声波指纹识别技术SenserID的出现,屏下指纹的全面屏手机变得越来越普及。
与传统指纹识别不同,超声波指纹识别技术是通过发射超声波扫描紧贴屏幕的指纹,并根据接收到的反射超声波分析得出指纹的信息
超声波是频率超过人类听觉上限的声波,具有较强的穿透能力,能够穿透玻璃、铝、不锈钢、蓝宝石或塑料等。此外,例如汗水、护手霜或凝露等,从而提供一种更稳定、更精确的认证方法。
(1)超声波是指频率高于______ Hz的声波,______ (选填“能”或“不能”)在真空中传播。
(2)超声波传播中遇到障碍物时会有一部分被反射回来形成回声。已知超声波在海水中传播速度约为1500m/s,向海底垂直发射超声波,若4s后收到回声信号______ m。
(3)SenserID系统能置于手机内部,可以让超声波透过屏幕进行指纹识别,是因为超声波具有______ 的特点。
(4)超声波指纹识别是通过声波获取指纹的信息,以下各项应用中与此不同的是______ 。
A.科技工作者利用声呐探测海底深度
B.技工利用超声波给金属工件探伤
C.医生利用超声波除去人体内的结石
D.渔民利用声呐探测大海鱼群
(5)SenserID系统利用了仿生学原理,它模仿了下列哪个选项的生物______ 。
A.蝙蝠B.蜘蛛C.青蛙D.猫
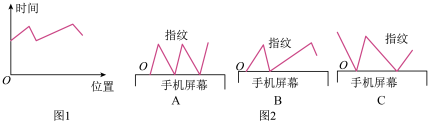
(6)SenserID系统向手指上若干个位置发射超声波,检测到被手指反射的信号时所需的时间随位置的变化情况如图1所示,由图可知这些位置指纹的大致形状______ 。
超声波指纹识别技术
传统指纹识别TouchID已成为智能手机的标配。随着黑科技超声波指纹识别技术SenserID的出现,屏下指纹的全面屏手机变得越来越普及。
与传统指纹识别不同,超声波指纹识别技术是通过发射超声波扫描紧贴屏幕的指纹,并根据接收到的反射超声波分析得出指纹的信息
超声波是频率超过人类听觉上限的声波,具有较强的穿透能力,能够穿透玻璃、铝、不锈钢、蓝宝石或塑料等。此外,例如汗水、护手霜或凝露等,从而提供一种更稳定、更精确的认证方法。
(1)超声波是指频率高于
(2)超声波传播中遇到障碍物时会有一部分被反射回来形成回声。已知超声波在海水中传播速度约为1500m/s,向海底垂直发射超声波,若4s后收到回声信号
(3)SenserID系统能置于手机内部,可以让超声波透过屏幕进行指纹识别,是因为超声波具有
(4)超声波指纹识别是通过声波获取指纹的信息,以下各项应用中与此不同的是
A.科技工作者利用声呐探测海底深度
B.技工利用超声波给金属工件探伤
C.医生利用超声波除去人体内的结石
D.渔民利用声呐探测大海鱼群
(5)SenserID系统利用了仿生学原理,它模仿了下列哪个选项的生物
A.蝙蝠B.蜘蛛C.青蛙D.猫
(6)SenserID系统向手指上若干个位置发射超声波,检测到被手指反射的信号时所需的时间随位置的变化情况如图1所示,由图可知这些位置指纹的大致形状
您最近一年使用:0次
科普阅读题
|
适中
(0.65)
【推荐2】阅读材料,回答问题。
传统指纹识别TouchID已成为智能手机的标配。随着黑科技超声波指纹识别技术SenseID的出现,屏下指纹的全面屏手机变得越来越普及。
与传统指纹识别不同,超声波指纹识别技术是通过发射超声波扫描紧贴屏幕的指纹,并根据接收到的反射超声波分析得出指纹的信息,进行比对解锁。
超声波是频率超过人类听觉上限的声波,具有较强的穿透能力,能够穿透玻璃、铝、不锈钢、蓝宝石或塑料等。此外,超声波扫描能够不受手指上可能存在的污物影响,例如汗水、护手霜或凝露等,从而提供一种更稳定、更精确的认证方式。
(1)超声波_______ (选填“能”或“不能”)在真空中传播;
(2)SenseID系统利用了仿生学原理,它模仿了下列哪个选项的生物______ ;
A.蝙蝠 B.蜘蛛 C.青蛙 D.猫
(3)SenseID是利用了超声波传递______ (选填“信息”或“能量”)的特性;
(4)SenseID系统向手指上若干个位置发射超声波,检测到被手指反射的信号时所需的时间随位置的变化情况如图1所示,由图可知这些位置指纹的大致形状,图2选项最符合的是_______ 。

超声波指纹识别技术
传统指纹识别TouchID已成为智能手机的标配。随着黑科技超声波指纹识别技术SenseID的出现,屏下指纹的全面屏手机变得越来越普及。
与传统指纹识别不同,超声波指纹识别技术是通过发射超声波扫描紧贴屏幕的指纹,并根据接收到的反射超声波分析得出指纹的信息,进行比对解锁。
超声波是频率超过人类听觉上限的声波,具有较强的穿透能力,能够穿透玻璃、铝、不锈钢、蓝宝石或塑料等。此外,超声波扫描能够不受手指上可能存在的污物影响,例如汗水、护手霜或凝露等,从而提供一种更稳定、更精确的认证方式。
(1)超声波
(2)SenseID系统利用了仿生学原理,它模仿了下列哪个选项的生物
A.蝙蝠 B.蜘蛛 C.青蛙 D.猫
(3)SenseID是利用了超声波传递
(4)SenseID系统向手指上若干个位置发射超声波,检测到被手指反射的信号时所需的时间随位置的变化情况如图1所示,由图可知这些位置指纹的大致形状,图2选项最符合的是
您最近一年使用:0次
科普阅读题
|
适中
(0.65)
解题方法
【推荐3】阅读短文,回答问题。
超声波指纹识别技术传统指纹识别技术(Touci ID)已成为智能手机的标配。随着黑科技超声波指纹识别技术(Sense ID)的出现,屏下指纹的全面屏手机(如图1所示)变得越来越普及。与传统指纹识别技术不同,超声波指纹识别技术是通过发射超声波扫描紧贴屏幕的指纹,并根据接收到的反射超声波分析得出指纹的信息,进行比对解锁。超声波是频率超过人类听觉上限的声波,具有穿透力强的特点,能够穿透玻璃、铝、不锈钢、蓝宝石和塑料等物质。此外,超声波扫描能够不受手指上可能存在的污物影响,例如汗水、护手霜或凝露等,从而提供一种更稳定、更精确的认证方法。


(1)超声波指纹识别技术______ (选填“能”或“不能”)在月球上使用;
(2)Sense ID系统能置于手机内部,是因为超声波具有______ 的特点;
(3)以下超声波的应用中用到的原理与超声波指纹识别的原理不同的是______ ;
A.用超声波探测海底深度 B.用超声波给金属工件探伤 C.用超声波清洗钟表等精密仪器
(4)用手指触摸手机屏幕时,Sense ID系统向手指上若干个位置发射超声波,系统检测到被手指反射的信号时,所需的时间随位置变化的情况如图2所示,由图可知手指上指纹的大致形状最可能是______ (填字母);
A. B.
B. 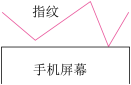 C.
C.  D.
D.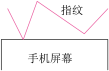
(5)某手机利用Sense ID系统,从发出超声波到接收到指纹反射的超声波用时8×10-6s,由此可知Sense lD系统到手机屏幕表面的距离为______ mm。(超声波的传播速度取340m/s)
超声波指纹识别技术传统指纹识别技术(Touci ID)已成为智能手机的标配。随着黑科技超声波指纹识别技术(Sense ID)的出现,屏下指纹的全面屏手机(如图1所示)变得越来越普及。与传统指纹识别技术不同,超声波指纹识别技术是通过发射超声波扫描紧贴屏幕的指纹,并根据接收到的反射超声波分析得出指纹的信息,进行比对解锁。超声波是频率超过人类听觉上限的声波,具有穿透力强的特点,能够穿透玻璃、铝、不锈钢、蓝宝石和塑料等物质。此外,超声波扫描能够不受手指上可能存在的污物影响,例如汗水、护手霜或凝露等,从而提供一种更稳定、更精确的认证方法。
(1)超声波指纹识别技术
(2)Sense ID系统能置于手机内部,是因为超声波具有
(3)以下超声波的应用中用到的原理与超声波指纹识别的原理不同的是
A.用超声波探测海底深度 B.用超声波给金属工件探伤 C.用超声波清洗钟表等精密仪器
(4)用手指触摸手机屏幕时,Sense ID系统向手指上若干个位置发射超声波,系统检测到被手指反射的信号时,所需的时间随位置变化的情况如图2所示,由图可知手指上指纹的大致形状最可能是
A.
B. C. D.(5)某手机利用Sense ID系统,从发出超声波到接收到指纹反射的超声波用时8×10-6s,由此可知Sense lD系统到手机屏幕表面的距离为
您最近一年使用:0次


