生活中,电梯超载时,自动报警系统的电铃响起,电梯无法起降,报警系统的工作原理如图甲所示,控制电路电源电压U=6V,电磁铁线圈电阻R0=150Ω。电阻箱R1的电阻设定为250Ω,R2为压敏电阻,其阻值与压力的大小关系如图乙所示。当线圈中的电流大于或等于10mA时,衔铁被吸合,受控制电路中电动机断电,报警电铃响,实现超载停机并发出提醒。
(1)电梯的自动报警电铃应接在_______ (选填“C、D”或“E、F”)之间。电磁铁通电时,上端为__________ 极;
(2)空载时电梯底座对R2的压力等于电梯厢的重力为4000N,闭合开关S1,求空载时控制电路中的电流大小_____ ;
(3)求该电梯限载人数_________ ;(设每人质量为70kg。g取10N/kg)
(4)若要求电梯限载人数减小,请对控制电路提出两种改进措施_________ 。
(1)电梯的自动报警电铃应接在
(2)空载时电梯底座对R2的压力等于电梯厢的重力为4000N,闭合开关S1,求空载时控制电路中的电流大小
(3)求该电梯限载人数
(4)若要求电梯限载人数减小,请对控制电路提出两种改进措施

2023·江苏南京·中考真题 查看更多[3]
更新时间:2024-03-18 19:01:34
|
相似题推荐
科普阅读题
|
较难
(0.4)
解题方法
【推荐1】阅读短文,回答问题
扫地机器人是一款能自动清扫地面的智能家用电器(如图甲所示)。
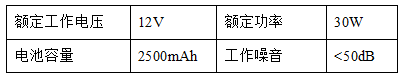
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其轮子的防滑皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物,当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电。


机器人中吸尘电机的吸入功率、风量和真空度是衡量其优劣的重要参数。风量指单位时间内通过吸尘电机排出的空气体积,真空度指主机内部气压与外界的气压差。
下表为某扫地机器人的部分参数:
(1)机器人工作时,主机内部的气压__ (大于/小于/等于)大气压而产生吸力;
(2)下列说法中错误的是____
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)若风量为0.015m3/s时,10min内通过吸尘电机排出的空气质量为__ kg; (ρ空气=1.3kg/m3)
(4)光敏电阻是制作灰尘传感器的常用元件。图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的增大而增大,R0为定值电阻。当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=__ Ω;
(5)为监测空气的透光程度,现将电压表表盘的相关刻度值转化为表示空气中灰尘数目的刻度,则转化后表盘上指针偏转程度越大表示空气中灰尘数目越__ (多/少)。
扫地机器人
扫地机器人是一款能自动清扫地面的智能家用电器(如图甲所示)。
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其轮子的防滑皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物,当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电。
机器人中吸尘电机的吸入功率、风量和真空度是衡量其优劣的重要参数。风量指单位时间内通过吸尘电机排出的空气体积,真空度指主机内部气压与外界的气压差。
下表为某扫地机器人的部分参数:
(1)机器人工作时,主机内部的气压
(2)下列说法中错误的是
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)若风量为0.015m3/s时,10min内通过吸尘电机排出的空气质量为
(4)光敏电阻是制作灰尘传感器的常用元件。图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的增大而增大,R0为定值电阻。当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=
(5)为监测空气的透光程度,现将电压表表盘的相关刻度值转化为表示空气中灰尘数目的刻度,则转化后表盘上指针偏转程度越大表示空气中灰尘数目越
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐2】阅读材料,回答问题。
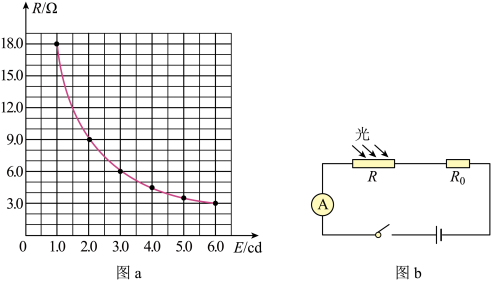
“光强”表示光的强弱程度的物理量,照射光越强,光强越大,光强符号用E表示,国际单位为坎德拉(cd),光敏电阻的阻值随光照射的强弱而改变。将电压恒为6V的电源,9Ω的定值电阻R0,光敏电阻R接入图b所示电路中,测得光敏电阻的阻值R与光强E间的关系如图a所示,根据图像及物理知识解答下列问题:
(1)光敏电阻是用______ (填“半导体”“超导体”或“绝缘体”)材料制成的;
(2)根据图a,当光强为E1时,光敏电阻的阻值为R1,当光强为E2时,光敏电阻的阻值为R2,那么它们之间的关系式为R1:R2=______ (用E1、E2表示);
(3)请在图b中加画上电压表,要求实现:光强越强,电压表的示数越大______ ;
(4)实验过程中,如果电流表的示数为0.4A,电压表示数为______ V,此时的光强为______ cd。
光强与光敏电阻
“光强”表示光的强弱程度的物理量,照射光越强,光强越大,光强符号用E表示,国际单位为坎德拉(cd),光敏电阻的阻值随光照射的强弱而改变。将电压恒为6V的电源,9Ω的定值电阻R0,光敏电阻R接入图b所示电路中,测得光敏电阻的阻值R与光强E间的关系如图a所示,根据图像及物理知识解答下列问题:
(1)光敏电阻是用
(2)根据图a,当光强为E1时,光敏电阻的阻值为R1,当光强为E2时,光敏电阻的阻值为R2,那么它们之间的关系式为R1:R2=
(3)请在图b中加画上电压表,要求实现:光强越强,电压表的示数越大
(4)实验过程中,如果电流表的示数为0.4A,电压表示数为
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
【推荐3】阅读短文,回答问题。
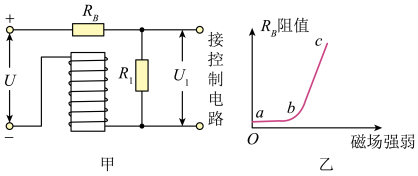
我国研制的某款智能防疫机器人,具有自主测温、移动、避障等功能。机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上,通过处理系统转变为热图像,实现对人群的体温检测,当发现超温人员,系统会自动语音报警,并在显示屏上用红色框标注此人的脸部。机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,图甲为控制电机运转的原理电路,U为输入电压,RB为磁敏电阻,阻值随外加磁场强弱的变化而改变。
机器人为有效避障,在移动过程中会发射、接收超声波(或激光)来侦测障物信息,当感知到前方障碍物时,机器人依靠减速器进行减速,并重新规则行驶路线。下表为机器人的部分参数,“电池比能量”为单位质量的电池所能输出的电能;“减速器的减速比”为输入转速与输出转速的比值。
(1)机器人在行进过程中遇到玻璃等透明障碍物时,利用___________ (选填“超声波”或“激光”)才能较好感知到障碍物;以移动机器人为参照物,障碍物是___________ 的。
(2)下列关于机器人的说法中,错误的是___________ 。
A.菲涅尔透镜的作用相当于凹透镜
B.菲涅尔透镜接收的是人体辐射出的电磁波
C.图甲中电磁铁是利用电流磁效应工作的
D.机器人发现体温为38℃的人会语音报警并识别
(3)若机器人以最大速度沿水平路面匀速直线运动7min,此过程机器人受到的阻力为___________ N,消耗的电能占电池所能输出总电能的___________ %。
(4)控制电机运转的磁敏电阻阻值随磁场强弱变化的图线如图乙,当磁敏电阻在正常工作区时,即使图甲电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动,则磁敏电阻的正常工作区对应图乙中___________ (选填“ab”或“bc”)段,已知无磁场时RB的阻值为200Ω,R1的阻值为400Ω,线圈电阻忽略不计,当U为24V时,处在磁场中的RB电功率为0.32W,则R1两端的电压U1是___________ V。
智能防疫机器人
我国研制的某款智能防疫机器人,具有自主测温、移动、避障等功能。机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上,通过处理系统转变为热图像,实现对人群的体温检测,当发现超温人员,系统会自动语音报警,并在显示屏上用红色框标注此人的脸部。机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,图甲为控制电机运转的原理电路,U为输入电压,RB为磁敏电阻,阻值随外加磁场强弱的变化而改变。
机器人为有效避障,在移动过程中会发射、接收超声波(或激光)来侦测障物信息,当感知到前方障碍物时,机器人依靠减速器进行减速,并重新规则行驶路线。下表为机器人的部分参数,“电池比能量”为单位质量的电池所能输出的电能;“减速器的减速比”为输入转速与输出转速的比值。
| 电池的质量 | 10kg | 减速器的减速比 | 30:1 |
| 电池比能量 | 140W·h/kg | 驱动电机的输入总功率 | 400W |
| 移动速度 | 0.1~1m/s | 驱动电机将电能转化为机械能的效率 | 60% |
(2)下列关于机器人的说法中,错误的是
A.菲涅尔透镜的作用相当于凹透镜
B.菲涅尔透镜接收的是人体辐射出的电磁波
C.图甲中电磁铁是利用电流磁效应工作的
D.机器人发现体温为38℃的人会语音报警并识别
(3)若机器人以最大速度沿水平路面匀速直线运动7min,此过程机器人受到的阻力为
(4)控制电机运转的磁敏电阻阻值随磁场强弱变化的图线如图乙,当磁敏电阻在正常工作区时,即使图甲电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动,则磁敏电阻的正常工作区对应图乙中
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐1】阅读材料,回答问题。
人工心脏泵
血液是人体输送氧气与营养的主要载体,心脏就像发动机,为这一输送提供了动力。医生给心脏疾病的患者做手术时,往往要用一种称为“人工心脏泵”的体外装置来代替心脏,以推动血液循环。
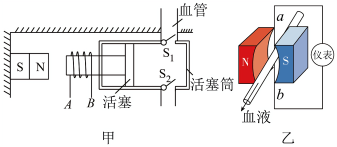
如图甲是该装置的示意图,线圈AB固定在用某种金属材料制成的活塞柄上,通电时线圈与活塞柄组成的系统与固定在左侧的磁体相互作用,从而带动活塞运动。活塞筒通过阀门与血管相通,阀门S1只能向外开启,S2只能向内开启。手术时,还需要利用电磁血流计来检测血流速度和血流量(血流量指单位时间内通过血管横截面的血液体积),其示意图如图乙所示。使用时,将血管放置于两磁极之间,两金属电极a、b与血管壁接触,就会有微弱电流流过仪表显示出血流速度。
研究表明,血管内血流速度会随血管横截面积的变化而变化,且血液匀速通过血管时,受到的阻力与血液的流速成正比。当血管横截面积为正常值的n倍时,测得心脏主动脉血管内血液匀速流动的速度v与n的数值如表所示。
(1)甲图中,当线圈中的电流从B流向A时,活塞向_____ (选填“左”或“右”)运动,血液从_____ (选填“S1流出”或“S2流入”);
(2)线圈AB所固定的活塞柄适宜用下列哪种金属材料制作( )
A.铜 B.铁 C.银 D.铝合金
(3)血管中有血液流过时,电磁血流计能检测到微弱的电流,从能量转化的角度分析,这是_____ 能转化为_____ 能的过程;
(4)若某次测得血液匀速流动的速度为0.2m/s,血流量为10-4m3/s,则对应血管的横截面积为_____ m2;
(5)当心脏主动脉血管的横截面积变化时,其血液仍匀速流动,则推动血液流动的功率P与下列哪一选项成正比?____
A.n B. C.n2 D.
C.n2 D.
人工心脏泵
血液是人体输送氧气与营养的主要载体,心脏就像发动机,为这一输送提供了动力。医生给心脏疾病的患者做手术时,往往要用一种称为“人工心脏泵”的体外装置来代替心脏,以推动血液循环。
如图甲是该装置的示意图,线圈AB固定在用某种金属材料制成的活塞柄上,通电时线圈与活塞柄组成的系统与固定在左侧的磁体相互作用,从而带动活塞运动。活塞筒通过阀门与血管相通,阀门S1只能向外开启,S2只能向内开启。手术时,还需要利用电磁血流计来检测血流速度和血流量(血流量指单位时间内通过血管横截面的血液体积),其示意图如图乙所示。使用时,将血管放置于两磁极之间,两金属电极a、b与血管壁接触,就会有微弱电流流过仪表显示出血流速度。
研究表明,血管内血流速度会随血管横截面积的变化而变化,且血液匀速通过血管时,受到的阻力与血液的流速成正比。当血管横截面积为正常值的n倍时,测得心脏主动脉血管内血液匀速流动的速度v与n的数值如表所示。
| 血管横截面积与正常值的倍数n | 1.00 | 0.90 | 0.80 | 0.75 | 0.60 |
| 主动脉内血液匀速流动的速度v/m•s-1 | 0.180 | 0.200 | 0.225 | 0.240 | 0.300 |
(2)线圈AB所固定的活塞柄适宜用下列哪种金属材料制作
A.铜 B.铁 C.银 D.铝合金
(3)血管中有血液流过时,电磁血流计能检测到微弱的电流,从能量转化的角度分析,这是
(4)若某次测得血液匀速流动的速度为0.2m/s,血流量为10-4m3/s,则对应血管的横截面积为
(5)当心脏主动脉血管的横截面积变化时,其血液仍匀速流动,则推动血液流动的功率P与下列哪一选项成正比?
A.n B.
C.n2 D.
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐2】阅读短文,回答问题。
________ 能。当图甲中电磁铁线圈中电流从a流向b时,电磁铁下端是________ 极;
(2)下列说法正确的是_______
A.红外线感应装置利用超声波进行工作
B.暖风烘干是靠增大面积来加快水的汽化
C.纳米银是银分子,喷水杆材料具有良好的导电性
D.漏电保护装置内的火线与零线短路时,开关S不会被吸起
(3)洁具正常工作,按最小喷水量用设定为40℃的温水清洗,10min喷出的水吸收的热量为_______ J;清洗结束,暖风烘干机工作40s,消耗的电能为_______ kW·h,会使标有“3000imp/(kW·h)”的电能表指示灯闪烁________ 次。【水的比热容c=4.2×103J/(kg·℃),水的密度ρ=1.0×103kg/m3,室温为20℃】
(4)图乙为洁具的温控装置原理图。R1是滑动变阻器,R2是热敏电阻,其阻值随温度升高而减小。当R1两端电压U1增大到一定值时,控制电路将切断加热电路实现对水温的控制。适当_______ (选填“增大”或“减小”)电源电压,可使控制水温的预设值升高。
智能洁具
智能洁具(智能马桶、全自动洗碗机、智能浴缸等),具有温水洗净、暖风烘干、杀菌等功能,已进入百姓家庭。某智能洁具为确保安全,插头带漏电保护装置,工作原理如图甲所示,连接洁具的火线与零线穿过环形铁芯。正常工作时,两线中的电流相等;若火线与零线中的电流不等,绕在铁芯上的线圈会产生电流,经放大后通过电磁铁吸起铁质开关S切断电源。这种洁具装有红外线感应装置,当人靠近时,感应装置自动升起洁具盖子,启动洗净功能,加热器将水快速加热至温控装置预设的温度,水泵喷水实施清洗。喷水杆采用纳米银(直径为纳米级的银单质)材料,杀菌效果好。清洗结束,暖风烘干机自动开启烘干功能。如表为该洁具的部分参数。额定电压 | 220V | 清洗喷水量 | 0.8~1.2L/min |
烘干机额定功率 | 180W | 加热器额定功率 | 2100W |
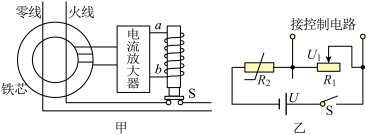
(2)下列说法正确的是
A.红外线感应装置利用超声波进行工作
B.暖风烘干是靠增大面积来加快水的汽化
C.纳米银是银分子,喷水杆材料具有良好的导电性
D.漏电保护装置内的火线与零线短路时,开关S不会被吸起
(3)洁具正常工作,按最小喷水量用设定为40℃的温水清洗,10min喷出的水吸收的热量为
(4)图乙为洁具的温控装置原理图。R1是滑动变阻器,R2是热敏电阻,其阻值随温度升高而减小。当R1两端电压U1增大到一定值时,控制电路将切断加热电路实现对水温的控制。适当
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐3】阅读短文,回答问题:___________ 能。
(2)图乙中S1闭合时,干簧管两簧片的触点因线圈通电后内部产生的磁场而吸合。已知通电线圈内部磁感线的环绕方向与外部磁感线的环绕方向形成闭合曲线。同学们将这种情形与放置条形磁铁进行类比,画出以下四幅图,你认为合理的是___________ 。
B.(3)
C.(1)和(4)
D.(2)和(3)
(3)图丙中,双触点干簧管的1、2、3三个簧片对应的制作材料可能是___________ 。
A.铁、铁、铜
B.铁、铜、铁
C.铜、铁、铁
D.铁、钴、铁
(4)如图丁所示,将条形磁铁平行于干簧管放置在其下方,干簧管两簧片的触点___________ 。
A.均被磁化为S极
B.均被磁化为N极
C.上触点为N极,下触点为S极
D.上触点为S极,下触点为N极
(5)某兴趣小组用干簧管继电器设计如图戊所示的控制电路。开关闭合后,两灯的发光情况是___________ 。
干簧管
干簧管是一个通过磁场控制通断的开关。如图甲所示,将两片有弹性的软磁性金属(铁、钴、镍等)簧片密封在玻璃管内组成干簧管。在磁场中,管内两簧片的触点部位被磁化成为异名磁极互相吸引,两簧片触点吸合在一起;外磁场消失后,两个簧片因失去磁性而恢复原状,两触点分开。如图乙所示,在干簧管的玻璃管上绕有线圈做成干簧管继电器。当闭合图中开关S1时,两簧片触点也会吸合在一起。图丙是一个双触点干簧管,由三个簧片组成,其中簧片1是公共端,簧片2是常闭接点,簧片3是常开接点。当外界没有磁场时,簧片1与簧片2触点部位接通;当外界有磁场时,簧片1与簧片2的触点连接断开、与簧片3触点接通。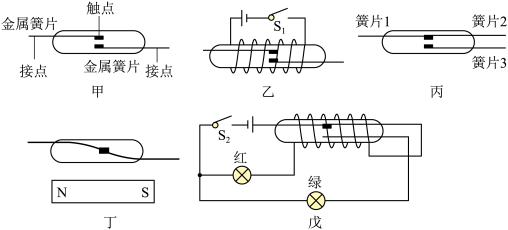
(2)图乙中S1闭合时,干簧管两簧片的触点因线圈通电后内部产生的磁场而吸合。已知通电线圈内部磁感线的环绕方向与外部磁感线的环绕方向形成闭合曲线。同学们将这种情形与放置条形磁铁进行类比,画出以下四幅图,你认为合理的是

B.(3)
C.(1)和(4)
D.(2)和(3)
(3)图丙中,双触点干簧管的1、2、3三个簧片对应的制作材料可能是
A.铁、铁、铜
B.铁、铜、铁
C.铜、铁、铁
D.铁、钴、铁
(4)如图丁所示,将条形磁铁平行于干簧管放置在其下方,干簧管两簧片的触点
A.均被磁化为S极
B.均被磁化为N极
C.上触点为N极,下触点为S极
D.上触点为S极,下触点为N极
(5)某兴趣小组用干簧管继电器设计如图戊所示的控制电路。开关闭合后,两灯的发光情况是
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
名校
解题方法
【推荐1】阅读短文,回答问题。
国家规定燃气灶须安装熄火自动保护装置,在意外熄火(如汤水激出)时,装置能自动关闭气路,图甲为海涛设计的模拟装置示意图,电源电压U=6V,定值电阻R0=200Ω,当电磁铁线圈中的电流I≤0.02A时,衔铁K被释放从而关闭气路(未画出)启动保护,反之打开气路,线圈电阻不计,热敏电阻Rt的阻值与温度的关系如图乙中图线①所示,闭合开关S,则:

(1)电磁铁上端为______ (选填“N”或“S”)极,世界上第一个发现电能生磁的科学家是______ 。停止加热(意外熄火)后,随着Rt温度降低,线圈中电流将变______ (选填“大”或“小”);
(2)当温度为20℃时,电路的电流是______ A,电路中的总功率是______ W;
(3)装置启动保护时,Rt的最高温度是______ ℃;
(4)若仅将Rt更换为图线②所示的热敏电阻(两只热敏电阻的吸、放热本领相同),小华发现装置启动保护的灵敏度会______ 。
国家规定燃气灶须安装熄火自动保护装置,在意外熄火(如汤水激出)时,装置能自动关闭气路,图甲为海涛设计的模拟装置示意图,电源电压U=6V,定值电阻R0=200Ω,当电磁铁线圈中的电流I≤0.02A时,衔铁K被释放从而关闭气路(未画出)启动保护,反之打开气路,线圈电阻不计,热敏电阻Rt的阻值与温度的关系如图乙中图线①所示,闭合开关S,则:
(1)电磁铁上端为
(2)当温度为20℃时,电路的电流是
(3)装置启动保护时,Rt的最高温度是
(4)若仅将Rt更换为图线②所示的热敏电阻(两只热敏电阻的吸、放热本领相同),小华发现装置启动保护的灵敏度会
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐2】阅读下列短文,回答问题。
压敏电阻器是一种具有非线性伏安特性的电阻器件,主要用于在电路承受过压时进行电压钳位,吸收多余的电流以保护敏感器件,其电阻体材料导电性能介于导体和绝缘体之间。如图甲所示,这是压敏电阻 的阻值随压力F变化的关系图像,如图乙所示,这是用压敏电阻设计的一种“自动限重器”,该装置由控制电路和工作电路组成,其主要元件有电磁继电器、货物装载机
的阻值随压力F变化的关系图像,如图乙所示,这是用压敏电阻设计的一种“自动限重器”,该装置由控制电路和工作电路组成,其主要元件有电磁继电器、货物装载机 实质是电动机
实质是电动机 、压敏电阻和定值电阻
、压敏电阻和定值电阻 等。当货架承受的压力达到限定值,电磁继电器会自动控制货物装载机停止向货架上摆放物品。已知控制电路的电源电压
等。当货架承受的压力达到限定值,电磁继电器会自动控制货物装载机停止向货架上摆放物品。已知控制电路的电源电压 ,电磁继电器线圈的阻值
,电磁继电器线圈的阻值 ,定值电阻
,定值电阻 。
。

(1)当货架没有装载货物时货架的质量忽略不计,压敏电阻的阻值为___________  ;随着货架装载货物质量的增大,压敏电阻的阻值将
;随着货架装载货物质量的增大,压敏电阻的阻值将___________ ;
(2)电磁继电器中的电磁铁上端为___________ 选填“N”或“S”极;
(3)当电磁继电器线圈中的电流大小为30mA时衔铁被吸下,则货架能承受的最大压力为___________ N;
(4)为了调节货架能承受的最大压力,可将定值电阻替换为滑动变阻器,若需要控制货架能承受的最大压力为800N,则替换的滑动变阻器的最大阻值应不小于___________ 。
压敏电阻器是一种具有非线性伏安特性的电阻器件,主要用于在电路承受过压时进行电压钳位,吸收多余的电流以保护敏感器件,其电阻体材料导电性能介于导体和绝缘体之间。如图甲所示,这是压敏电阻
的阻值随压力F变化的关系图像,如图乙所示,这是用压敏电阻设计的一种“自动限重器”,该装置由控制电路和工作电路组成,其主要元件有电磁继电器、货物装载机实质是电动机、压敏电阻和定值电阻等。当货架承受的压力达到限定值,电磁继电器会自动控制货物装载机停止向货架上摆放物品。已知控制电路的电源电压,电磁继电器线圈的阻值,定值电阻。(1)当货架没有装载货物时
货架的质量忽略不计,压敏电阻的阻值为;随着货架装载货物质量的增大,压敏电阻的阻值将(2)电磁继电器中的电磁铁上端为
选填“N”或“S”极;(3)当电磁继电器线圈中的电流大小为30mA时衔铁被吸下,则货架能承受的最大压力为
(4)为了调节货架能承受的最大压力,可将定值电阻
替换为滑动变阻器,若需要控制货架能承受的最大压力为800N,则替换的滑动变阻器的最大阻值应不小于。
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐3】阅读短文,回答问题。
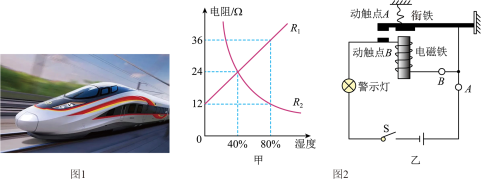
如图1所示是我国具有完全自主知识产权的“CR400AF”动车组,经过近4年的运行检验,说明我们的高铁技术是世界领先的,是稳定可靠的。它采用了全新低阻力流线型头型,全车部署了2500余项监测点,能够对冷却系统、制动系统、运行系统全方位实时监测,列车内还设有高清摄像监控,无线WIFI,配备USB插口等。动车部分参数见表。(设乘客人均质量为50kg)
(1)“复兴号”动车车头采用了流线型设计是为了______ ;
(2)坐在“复兴号”动车上的一乘客记录了他匀速完全通过长1400m的隧道的时间为30s,若这列长250m的动车在隧道中的运行速度为______ m/s;
(3)推重比是衡量动车牵引能力的重要指标,其含义是动车匀速运行时的牵引力与车总重的比值。经检测,“复兴号”动车运行时的总阻力f与列车速度v满足 关系,其中
关系,其中 ,则“复兴号”动车以100m/s的速度满载运行时的推重比是
,则“复兴号”动车以100m/s的速度满载运行时的推重比是______ 。则牵引力每秒做功______ J;
(4)阴雨天,空气潮湿,能见度低,路面湿滑,为保证旅客上下动车时的安全,需在车门旁开启警示灯。如图2乙所示是某同学为动车设计的模拟电路:
①选择图2甲中的______ (选择“”或“”)湿敏电阻,将它串联在图2乙电路中的______ (选择“A”或“B”)位置,闭合开关,警示灯能随湿度变化而自动调整亮度,且不断闪烁;
②已知电源电压为6V,警示灯的规格是“6V 3W”,当空气湿度为80%时,闪烁的过程中,灯较暗时的实际功率是______ W(电磁铁电阻忽略不计,灯泡电阻不随温度变化)。
“复兴号”动车
如图1所示是我国具有完全自主知识产权的“CR400AF”动车组,经过近4年的运行检验,说明我们的高铁技术是世界领先的,是稳定可靠的。它采用了全新低阻力流线型头型,全车部署了2500余项监测点,能够对冷却系统、制动系统、运行系统全方位实时监测,列车内还设有高清摄像监控,无线WIFI,配备USB插口等。动车部分参数见表。(设乘客人均质量为50kg)
车身质量m(t) | 360 |
每节车厢长L(m | 25 |
车厢数(节) | 8 |
每节载客(人) | 100 |
最高时速( | 400 |
 )
)(2)坐在“复兴号”动车上的一乘客记录了他匀速完全通过长1400m的隧道的时间为30s,若这列长250m的动车在隧道中的运行速度为
(3)推重比是衡量动车牵引能力的重要指标,其含义是动车匀速运行时的牵引力与车总重的比值。经检测,“复兴号”动车运行时的总阻力f与列车速度v满足
关系,其中,则“复兴号”动车以100m/s的速度满载运行时的推重比是(4)阴雨天,空气潮湿,能见度低,路面湿滑,为保证旅客上下动车时的安全,需在车门旁开启警示灯。如图2乙所示是某同学为动车设计的模拟电路:
①选择图2甲中的
”或“”)湿敏电阻,将它串联在图2乙电路中的②已知电源电压为6V,警示灯的规格是“6V 3W”,当空气湿度为80%时,闪烁的过程中,灯较暗时的实际功率是
您最近一年使用:0次


