1 . 请画出由S点发出的光经过凸透镜后的折射光线。

您最近一年使用:0次
2024-05-02更新
|
210次组卷
|
48卷引用:2024年辽宁省兴城市中考二模物理试题
2024年辽宁省兴城市中考二模物理试题2017秋人教版八年级物理上册 期末测试江苏省东台市第三教育联盟2017-2018学年度第一学期第三次考试八年级物理试题安徽省含山县姚庙中学2017-2018学年上学期初二物理期末考试试题江苏省扬州市竹西中学2017-2018学年八年级上学期期末考试物理试题教科版八年级上册物理 第四章 在光的世界里 单元巩固训练题【市级联考】湖北省孝感市2017-2018学年八年级上学期期末模拟物理试题教科版八年级物理 第四章 在光的世界里练习题江苏省盐城市东台市三仓镇中学2019届九年级下学期第一次月考物理试题江苏省泰州市姜堰市第八中学2019届九年级下学期段考物理试题上海市2017-2018学年八年级上学期期末考试物理试题河南省濮阳市市直中学2018-2019学年八年级上学期期末联考物理试题山东省德州市2019-2020学年八年级上学期期末物理试题福建省三明市宁化县2019-2020学年八年级上学期期中考试物理试题江苏省苏州市2019-2020学年八年级上学期期末考试物理试题福建省三明市宁化县2020-2021学年八年级上学期期中考试物理试题四川省江油市2020~2021学年八年级上学期期末考试物理试题山东省济宁市金乡县2020-2021学年八年级上学期期末考试物理试题云南省大理州祥云县2020-2021学年八年级上学期期末学业成绩评定测试物理试题江苏省宿迁市沭阳县修远中学2021-2022学年八年级12月第二次阶段测试物理试题(已下线)2021年青海省中考物理真题变式汇编19-24题河南省南阳市西峡县城区第二初级中学2021-2022学年九年级12月月考物理试题山东省临沂市郯城县2020-2021学年八年级上学期期末考试物理试题(已下线)初中物理大单元作业设计人教版八上5.1透镜及其应用山东省德州市武城县2019-2020学年八年级上学期期末物理试题广东省深圳市宝安区桥兴学校2022-2023学年八年级上学期期中物理试题安徽省六安市舒城育才学校2022-2023学年八年级上学期12月月考物理试题河北省邯郸市永年区2021-2022学年八年级上学期期末物理试题广西百色市靖西市2020-2021学年八年级上学期期末物理试题陕西省西安高新第一中学等校2022-2023学年八年级上学期“名校”第一次月考物理试题河南省信阳市潢川县2022-2023学年八年级上学期期末学业水平物理试题广东省中山市小榄花城中学2022-2023学年九年级下学期第一次月考物理试题陕西省宝鸡市陇县2022-2023学年八年级上学期期末物理试题2023年甘肃省兰州市中考理综物理试题山东省菏泽市定陶区2022-2023学年九年级下学期期中物理试题甘肃省兰州市2020-2021学年八年级下学期期中物理试题湖北省襄阳市谷城县2022-2023学年八年级上学期期末考试物理试题(已下线)专题02 透镜及其应用【精讲】-2023-2024八年级物理上期末专题突破系列【人教版】(已下线)【寒假自学课】2024年八年级物理寒假提升学与练 第05讲 透镜及其应用陕西省商洛市洛南县城关中学2023-2024学年八年级上学期1月期末物理试题湖南省株洲市醴陵市2023-2024学年八年级上学期1月期末物理试题山东省临沂兰山2023-2024学年八年级上学期期末考试物理试题山东省临沂市兰山区2023-2024学年八年级上学期期末考试物理试题江苏省南通市启东市2023-2024学年八年级上学期1月期末物理试题山东省临沂市外国语学校2023-2024学年九年级3月学科竞赛物理试题2024年中考物理二轮热点题型归纳与变式演练(全国通用) 专题03 透镜及其应用(7大题型)云南省昭通市昭阳区第一中学2023-2024学年九年级下学期5月月考物理试题2024年安徽省合肥市庐阳中学中考三模物理试题
名校
解题方法
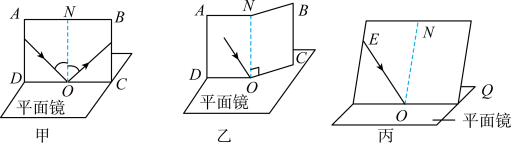
2 . 如图是“探究光的反射规律”的实验装置,其中ABCD是白色硬纸板制成的光屏,并能沿ON折转:________ 。硬纸板的作用:a.显示光路;b.________ ;
(2)小丽改变入射角大小,多次实验后,得到如下几组数据:
根据表中的数据可以归纳出的规律是________ ;
(3)如图丙将纸板倾斜放置,此时反射光束________ (选填字母符号);
A.仍在纸板上呈现
B.被纸板挡住
C.在纸板前方
(4)实验结束后,同组的小明和小刚都想从镜子中看到对方的眼睛,而不想让对方看到自己的眼睛,你认为没有能做到的原因是________ 。
(2)小丽改变入射角大小,多次实验后,得到如下几组数据:
实验次数 | 1 | 2 | 3 | 4 |
入射角/° | 20 | 30 | 40 | 60 |
反射角/° | 20 | 30 | 40 | 60 |
(3)如图丙将纸板倾斜放置,此时反射光束
A.仍在纸板上呈现
B.被纸板挡住
C.在纸板前方
(4)实验结束后,同组的小明和小刚都想从镜子中看到对方的眼睛,而不想让对方看到自己的眼睛,你认为没有能做到的原因是
您最近一年使用:0次
解题方法
3 . 在某次青少年“自制赛车”展示活动中,有甲、乙两个自制赛车在周长为20m的圆形轨道上,做速度大小均保持不变的运动。当它们同时从同一位置出发,甲赛车跑完100m路程时乙赛车跑90m路程,均用100s。若甲、乙赛车按此速度跑完1000m路程,那么当甲赛车完成任务时,乙赛车还有多少m路程要跑?

您最近一年使用:0次
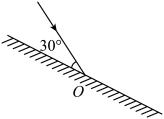
4 . 如图所示,一束与平面镜成30°角的光入射到平面镜上,请根据光的反射定律,画出反射光线并标出反射角的度数。
您最近一年使用:0次
2024-04-06更新
|
466次组卷
|
75卷引用:辽宁省阜新市第一中学2022-2023学年八年级上学期期中考试物理试题
辽宁省阜新市第一中学2022-2023学年八年级上学期期中考试物理试题2018-2019学年度八年级物理上册同步练习:4.2 光的反射山东省东营市2018年中考物理试题人教版物理八年级上册 第四章 第2节 光的反射 同步测试题江苏省高邮市朝阳中学2018-2019学年八年级上学期期中试题【校级联考】湖北省武汉市新洲区部分学校2018~2019学年八年级上学期期中联考物理试题山东济宁鱼台县2018-2019学年八年级上学期期中教学质量监测物理试题【校级联考】河北省石家庄市新乐市2018-2019学年八年级上学期期末考试物理试题2019湖北省襄阳市南漳县九年级一模物理试题(已下线)【万唯原创】2019年河南省中考面对面夯实基础过教材 第4讲 光现象(已下线)【万唯原创】光学作图·满分特训(一)(已下线)《课时同步练》2020-2021学年八年级物理上册课时同步练(人教版) 第四章 光现象 第2节 第2课时 镜面反射和漫反射 反射作图(已下线)【万唯原创】光学作图·特训(一)(已下线)【万唯原创】光学作图·特训(六)四川省成都邛崃市2019-2020学年八年级上学期期中考试物理试题山东省临沂市兰山区2018-2019学年八年级上学期期中考试物理试题四川省德阳市广汉市2019-2020学年八年级上学期期末考试物理试题吉林省吉大附中2020-2021学年八年级10月月考物理试题(已下线)【万唯原创】2020年山西省中考物理逆袭复诊特训 特训41 作图题2020年青海省海东市中考三模物理试题(已下线)【万唯原创】2019年山西省中考物理面对面 第一部分 夯实基础过教材 第四章 光现象(已下线)【万唯原创】2019年山西省中考试题研究 第二部分 常考专题研究 专题四 作图题 二 、光学作图河北省保定市曲阳县2020-2021学年八年级上学期期中考试物理试题(已下线)【万唯原创】光学作图·特训(二)广东省佛山市高明区2020-2021学年八年级上学期期末教学质量物理试题湖南省娄底市娄星区2020-2021学年八年级上学期期末考试物理试题(已下线)《初中同步单元卷》 2020-2021学年八年级物理全一册同步单元AB卷(京改版) 第八章 光现象(A卷基础篇)吉林省德惠市第二十九中学2020-2021学年九年级3月月考物理试题2020年广西壮族自治区河池市宜州区中考一模物理试题湖北省宜昌市第三中学2021-2022学年八年级上学期学生素质发展轨迹(期中)物理试题甘肃省武威市民勤六中2020-2021学年八年级上学期期中考试物理试题山东省德州九中2021-2022学年八年级上学期期中考试物理试题广东省河源市紫金县2021-2022学年八年级上学期期末考试物理试题2022年福建省福州市中考适应性考试物理试题湖南省湘潭市岳塘区电机子弟中学2020-2021学年八年级上学期期中考试物理试题四川省成都市郫都区成都绵实外国语学校2020-2021学年八年级上学期期中考试物理试题四川省成都十一中2020-2021学年八年级(上)期中考试物理试题陕西省咸阳市乾县2021-2022学年八年级(上)期末考试物理试题广东省茂名市高州市十校联考2021-2022学年八年级上学期期中物理试题(B卷)广东省茂名市高州市十校联考2021-2022学年八年级上学期期中物理试题(A卷)江苏省扬州市广陵区2021-2022学年八年级上学期期中物理试题江苏省盐城市射阳实验初中2021-2022学年八年级上学期期中物理试题山东省日照市几校联考2021-2022学年八年级上学期期中物理试题江西省景德镇市乐平五中2021-2022学年八年级上学期期中物理试题重庆市第八中学校2022-2023学年八年级上学期期中物理试题广西百色市乐业县2022-2023学年八年级上学期期中物理试题湖南省邵阳十六中2021-2022学年八年级上学期期末物理试题2023年福建省厦门市同安一中滨海校区中考物理一模试题湖南省永州市2022-2023学年九年级下学期期中物理试题湖北省武汉市2022-2023学年八年级上学期期中模拟物理试题山东省德州市乐陵市2020-2021学年八年级上学期期中考试物理试题江苏省泰州市姜堰区2023-2024学年八年级上学期11月期中物理试题广东省佛山市南海区狮山镇2023-2024学年八年级上学期期中教学质量监测物理试题湖北省武汉市东西湖区2023-2024学年八年级上学期期中考试物理试题安徽省合肥市行知中学2023-2024学年八年级上学期期中考试物理试题河北省邢台市信都区2023-2024学年八年级上学期期中考试物理试题江西省九江市修水县2023-2024学年八年级上学期11月期中物理试题河南省周口市扶沟县2023-2024学年八年级上学期期中考试物理试题(已下线)【专题】2023-2024学年八年级物理上学期期末考点大串讲(人教版) 专题03 光现象和透镜【题型训练】(95题26大类型)福建省泉州市永春三中片区2023-2024学年八年级上学期期中联考物理试题云南省楚雄彝族自治州2022-2023学年八年级上学期期末教育学业质量监测物理试题广东省珠海市香洲区文园中学2022-2023学年八年级上学期期中考试物理试题河北峰峰第一中学2023-2024学年八年级上学期期中考试物理试题河南省焦作市第十八中学2021-2022学年八年级上学期期中物理试题江苏省/淮安市洪泽湖初级中学2023-2024学年八年级上学期期中考试物理试题广东省惠州市惠城区第八中学2022-2023学年八年级上学期期中考试物理试题甘肃省定西市陇西县B2片区联考2023-2024学年八年级上学期1月期末物理试题重庆市忠县花桥中学2023-2024学年八年级上学期期中考试物理试题湖北省随州市随县安居镇中心学校2021-2022学年八年级下学期开学物理试题广东省珠海市文园中学2023-2024学年八年级下学期寒期学情反馈(开学)物理试题2024广东中考模拟物理试题广东省肇庆市肇庆中学2023-2024学年九年级下学期摸底考试物理试题2022年福建省福州市第十六中学中考物理一模试卷2024年陕西省西安市爱知初级中学=中考一模物理试题2024年广西壮族自治区柳州市柳北区鱼峰区5月中考模拟联考三模物理试题
名校
5 . 如图所示,关于声现象,下列说法正确的是( )
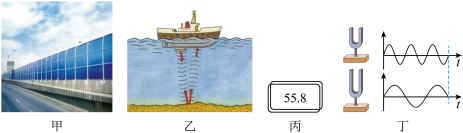
| A.甲图:在靠近居民区的路段设置声音屏障,目的是在声源处减弱噪声 |
| B.乙图:利用超声可以探测海底深度,说明超声波在海水中的传播速度大于其他声波 |
| C.丙图:城市中的噪声监测仪,数字55.8后的单位应该是Hz |
| D.丁图:从上、下两个音叉振动的波形图中,可看出上面的音叉发声音调高 |
您最近一年使用:0次
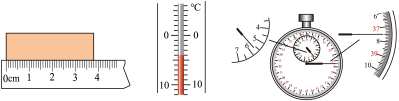
6 . 如图所示,物体的长度为_________ cm,温度计示数为________ ℃,秒表读数为__________ s。
您最近一年使用:0次
7 . 阅读短文,回答问题。
智能机器人
如图是某款智能防疫机器人,具有自主测温、摄像、避降、消海、咨询宣导等功能,在医疗机构、交通枢纽等众多场所的疫情防控中发挥重要作用,为防疫人员减负增效。利用镜头可将人体辐射的红外线会聚到探测器上,通过处理系统转变为热图像,实现对人群的体温检测,当发现超温人员时,系统会自动语音报警,并在显示屏上用红色框标注人的脸部,机器人把实时拍摄的画面信息通过网络传输到监控中心。
机器人在运动过程中可发射,接收超声波(或激光)来侦测障碍物信息巧妙避障。当感知到前方有障碍物时,机器人会依靠减速器自动减速,并重新调整行驶路线。

(1)机器人语音报警说明声音可传递
(2)下列关于机器人的说法中,正确的有
A.机器人发出的超声波是人耳听不到的声音
B.当被拍摄的人远离机器人镜头时,人经镜头成的像会变大
C.机器人发现体温39℃的人会自动语音报警并识别
D.监控中心屏幕上的彩色画面是由红、绿、蓝三种色光混合而成
(3)机器人在行进过程中遇到玻璃等透明障碍物时利用
(4)智能机器人底盘呈正方形,边长为60cm,工作时的行走速度约为1m/s,要对一个长6.6m、宽3.6m的空房间进行消毒,它沿3.6m的宽边从一侧走到另一侧需要
您最近一年使用:0次
名校
解题方法
8 . 如图是相向而行的甲、乙两物体的s-t图象,下列说法中不正确的是( )

| A.相遇时两物体通过的路程均为100m |
| B.0~30s内甲、乙均做匀速直线运动 |
| C.甲的运动速度为10m/s |
| D.甲、乙是同时出发的 |
您最近一年使用:0次
9 . 在“测量物体运动的平均速度”实验中,小丽用小车、长木板、刻度尺、秒表、木块等器材,探究小车沿斜面滑下时速度的变化实验设计如图所示,分别测出小车到达B点和C点的时间tB、tC。
(1)实验中应使斜面坡度保持较________ (选填“大”或“小”),便于减小________ (选填“时间”或“路程”)的测量产生的误差;
(2)如图所示,小车从B到C经过的路程为________ cm,若tA、tB、tC所对应的时间如图所示,则小车在AC段的平均速度为________ m/s;
(3)实验前必须学会熟练使用电子表,如果让小车过了B点后才停止计时,则会使所测BC段的平均速度偏________ 。(填“大”或“小”)

(1)实验中应使斜面坡度保持较
(2)如图所示,小车从B到C经过的路程为
(3)实验前必须学会熟练使用电子表,如果让小车过了B点后才停止计时,则会使所测BC段的平均速度偏
您最近一年使用:0次
解题方法
10 . 汽车行驶过程中会产生噪声,为了减弱这种噪声污染,有些汽车使用了“以声消声”的方法,再利用扬声器产生反相噪声,与原噪声进行叠加( )
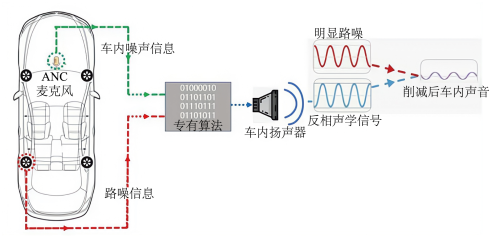
| A.汽车平稳驾驶时,不产生噪声 |
| B.可以抽取空气使车内成为真空状态来控制噪声 |
| C.消减后的声音响度比原来小 |
| D.消减后的车内声音为次声波 |
您最近一年使用:0次


