如图1所示,是某小组同学“用DIS验证动能定理”的实验装置,把轨道的一侧垫高,以补偿小车所受的阻力。实验过程中可近似认为钩码受到的总重力等于小车所受的拉力。先测出钩码所受的重力为G,由静止释放小车,测出挡光片通过光电门的时间△t。
(1)用螺旋测微器测量挡光片的宽度d,螺旋测微器示数如图2所示,则示数d=_______ mm;
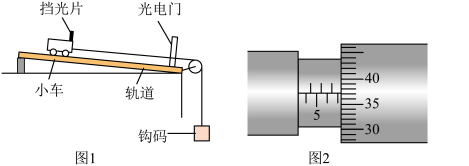
(2)为完成实验,除要测量小车释放时挡光片到光电门的距离 L 外还需要测量_______ ;(写出物理量名称和表示该物理量的字母)
(3)若在实验误差允许范围内,关系式GL=_______ 成立,则验证了动能定理(用题中所给的和添加的字母表示)。
(1)用螺旋测微器测量挡光片的宽度d,螺旋测微器示数如图2所示,则示数d=
(2)为完成实验,除要测量小车释放时挡光片到光电门的距离 L 外还需要测量
(3)若在实验误差允许范围内,关系式GL=
更新时间:2023-12-15 21:26:20
|
【知识点】 用DIS验证动能定理
相似题推荐
实验题
|
适中
(0.65)
名校
【推荐1】传感器是一种将非电学量转换成电信号的检测装置,它是实现自动检测和自动控制的首要环节;某物理课外活动小组利用力传感器和位移传感器进一步探究变力作用下的动能定理。如图甲所示,他们用力传感器通过定滑轮直接拉固定在小车上的细绳,测出拉力F;用位移传感器测出小车的位移s和瞬时速度v。已知小车质量为200g。

(1)某次实验得出拉力F随位移s变化规律如图乙所示,速度v随位移s变化规律如图丙所示。利用所得的F—s图像,求出s=0.30m到0.52m过程中力F做功W=______ J,此过程动能的变化ΔEk=______ J(保留2位有效数字)。
(2)下列情况中可减小实验误差的操作是______ 。(填选项前的字母,可能不止一个选项)
A.使拉力F要远小于小车的重力
B.实验时要先平衡摩擦力
C.要使细绳与滑板表面平行
(1)某次实验得出拉力F随位移s变化规律如图乙所示,速度v随位移s变化规律如图丙所示。利用所得的F—s图像,求出s=0.30m到0.52m过程中力F做功W=
(2)下列情况中可减小实验误差的操作是
A.使拉力F要远小于小车的重力
B.实验时要先平衡摩擦力
C.要使细绳与滑板表面平行
您最近一年使用:0次
实验题
|
适中
(0.65)
名校
【推荐2】某实验小组设计实验验证动能定理,在天花板上固定好一个力传感器。用一根不可伸长的细线,上端固定在力传感器上,下端固定在小球上,把小球拉离平衡位置使细线偏转一个角度,由静止释放小球,记下力传感器的最大示数 。除以上器材外,只有一把刻度尺。
。除以上器材外,只有一把刻度尺。
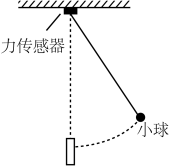
(1)为完成实验,需用刻度尺测量摆长 、小球静止时力传感器的示数
、小球静止时力传感器的示数 ,还需测量的量是
,还需测量的量是______ (此物理量的符号用 表示);
表示);
(2)小球受到的重力大小为______ ;小球从释放到平衡位置的过程中,动能的增加量为______ 。(用已知和测量物理量的符号表示)
(3)需要验证动能定理的表达式:____________ (用已知和测量物理量的符号表示)
。除以上器材外,只有一把刻度尺。(1)为完成实验,需用刻度尺测量摆长
、小球静止时力传感器的示数,还需测量的量是表示);(2)小球受到的重力大小为
(3)需要验证动能定理的表达式:
您最近一年使用:0次
实验题
|
适中
(0.65)
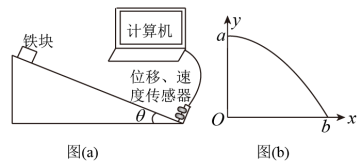
【推荐3】将位移传感器和速度传感器获得的数据同时输入计算机,可一次性直接得到位移和速度的关系图像。为了探究动能定理,科技小组设计了如图(a)所示装置,让铁块从倾角为θ的斜面上某位置由静止开始下滑,通过位移传感器测定铁块到传感器的距离l,用速度传感器测定与l对应位置铁块的速度,在计算机中得到如图(b)的曲线图像,曲线在(0,a)处的切线斜率为零,在(b,0)处的切线斜率大小为k,重力加速度为g。
(1)根据图(b)及已知量,可知下列说法正确的是________ 。
A.x是铁块到传感器的距离l,y是铁块的速度v
B.y是铁块到传感器的距离l,x是铁块的速度v
C.若铁块质量为m,则铁块下滑过程中所受合力大小为F=
D.若铁块质量为m,则铁块下滑过程中所受合力大小为F=
(2)在计算机中重新设置位移与速度的函数关系,让计算机绘出的x v2图像是一条斜率为k0的直线,则铁块与斜面间的动摩擦因数μ=________ 。
(1)根据图(b)及已知量,可知下列说法正确的是
A.x是铁块到传感器的距离l,y是铁块的速度v
B.y是铁块到传感器的距离l,x是铁块的速度v
C.若铁块质量为m,则铁块下滑过程中所受合力大小为F=
D.若铁块质量为m,则铁块下滑过程中所受合力大小为F=
(2)在计算机中重新设置位移与速度的函数关系,让计算机绘出的x v2图像是一条斜率为k0的直线,则铁块与斜面间的动摩擦因数μ=
您最近一年使用:0次


