阅读短文,回答问题。
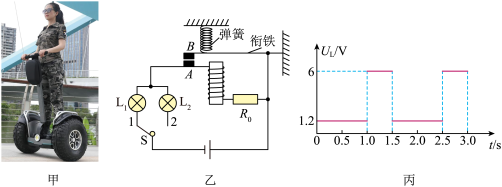
电动平衡车,又称体感车(如图甲),是一种时尚代步工具,它利用车体内部的陀螺仪和加速度传感器,来检测车体姿态的变化,并利用伺服控制系统,精确地驱动左右两个电动机进行相应的调整,以保持系统的平衡。电动平衡车采用站立式驾驶方式,通过身体重心和操控杆控制车体运行,采用锂电池组作为动力来源驱动左右两个电动机行驶。
(1)已知平衡车自重12kg,最大载重90kg。质量48kg的小明驾驶电动平衡车时,若每只轮胎着地面积约25cm2,此时对水平地面的压强是___________ Pa;(g取10N/kg)
(2)如图乙所示是科技兴趣小组为平衡车设计的转向指示灯电路。电路中电源电压恒为6V,指示灯L1、L2的规格均为“6V 6W”,R0为定值电阻,电磁铁线圈及衔铁的阻值忽略不计,不考虑指示灯电阻随温度的变化,当单刀双掷开关S与“1”接通后,左转指示灯L1会亮暗交替闪烁。在上述过程中,左转指示灯L1两端实际电压UL随时间t变化规律如图丙所示;
①当单刀双掷开关S与“2”接通时,电磁铁中有电流通过,右转指示灯L2发光___________ (填“较亮”或“较暗”);接着,衔铁被吸下,触点A与B接通,电磁铁和电阻R0被短路,右转指示灯L2发光___________ (填“较亮”或“较暗”)。此时,由于电磁铁中没有电流通过,衔铁被弹簧拉上去,触点A与B分离,电磁铁中又有电流通过,随后电磁铁又将衔铁吸下,如此循环,右转指示灯L2会亮暗交替闪烁;
②单刀双掷开关S与“1”接通,触点A与B分离时,电磁铁上端是___________ 极,定值电阻R0的阻值为___________ Ω;
③在单刀双掷开关S与“1”接通情况下,左转指示灯L1亮暗交替闪烁工作10min,则整个电路消耗的电能为___________ J。
电动平衡车
电动平衡车,又称体感车(如图甲),是一种时尚代步工具,它利用车体内部的陀螺仪和加速度传感器,来检测车体姿态的变化,并利用伺服控制系统,精确地驱动左右两个电动机进行相应的调整,以保持系统的平衡。电动平衡车采用站立式驾驶方式,通过身体重心和操控杆控制车体运行,采用锂电池组作为动力来源驱动左右两个电动机行驶。
(1)已知平衡车自重12kg,最大载重90kg。质量48kg的小明驾驶电动平衡车时,若每只轮胎着地面积约25cm2,此时对水平地面的压强是
(2)如图乙所示是科技兴趣小组为平衡车设计的转向指示灯电路。电路中电源电压恒为6V,指示灯L1、L2的规格均为“6V 6W”,R0为定值电阻,电磁铁线圈及衔铁的阻值忽略不计,不考虑指示灯电阻随温度的变化,当单刀双掷开关S与“1”接通后,左转指示灯L1会亮暗交替闪烁。在上述过程中,左转指示灯L1两端实际电压UL随时间t变化规律如图丙所示;
①当单刀双掷开关S与“2”接通时,电磁铁中有电流通过,右转指示灯L2发光
②单刀双掷开关S与“1”接通,触点A与B分离时,电磁铁上端是
③在单刀双掷开关S与“1”接通情况下,左转指示灯L1亮暗交替闪烁工作10min,则整个电路消耗的电能为
更新时间:2023-05-12 12:26:29
|
相似题推荐
科普阅读题
|
较难
(0.4)
名校
解题方法
【推荐1】阅读短文,回答问题。
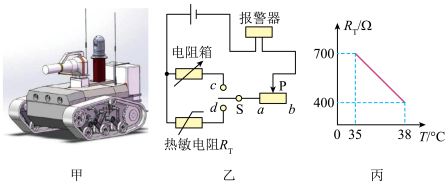
中国移动将 5G智能机器人如图甲所示,运用到校园环境监测中,进行红外智能测温以及校园消毒。
智能机器人配备了5台高清摄像头和红外热成像测温仪,能够在5m范围内同时扫描多达 10人的体温,如果检测到体温异常或者未带口罩,机器人会向相关人员自动发送警报。机器人当剩余电量减为电池容量的20%时,会主动寻找充电器充电。下表为某智能机器人的部分参数。
机器人上还安装了超声波雾化器自动喷枪,工作时,雾化片产生每秒170万次的高频率振动,将消毒液雾化成大量1um~5um的超微粒子,再吹散到空气中进行消杀病毒。其中额定雾化量是指雾化器正常工作1h雾化液体的体积。
如图乙是简化的智能测温报警电路:电源电压调为18V,报警器(电阻不计)通过的电流超过10mA时就会报警,电阻箱最大阻值为999Ω,热敏电阻RT其阻值随温度升高而减小,在 37℃时是500Ω。
(1)机器人在水平路面上一边向前匀速直线运动一边喷雾状消毒液时,机器人的动能______ ,机械能______ ;(两空均选填增大 、减小或不变)
(2)下列说法正确的是( )
A.高清摄像头是通过凸透镜成正立缩小的实像
B.红外测温仪工作时发出红外线射向人体再反射回测温仪内进行测温
C.机器人安装宽履带代替车轮,既为了增大摩擦,又为了减小压强
D.通过遥控器发出超声波来远程控制机器人的前进和后退
(3)若机器人的履带与地面的接触面面积是 300cm2,在装满密度为 0.9×103kg/m3的消毒液时,对水平地面的压强为______ Pa;(g取10N/kg)
(4)当所测温度达到或超过37℃时,要求报警电路系统报警,按照下列步骤调试电路:
①电路接通前,应先将滑动变阻器滑片置于b端,再将电阻箱调到______ Ω;
②将开关S向c端闭合,移动滑动变阻器的滑片,直至报警系统报警,此时滑动变阻器接入电路的阻值为______ Ω;
③保持滑动变阻器滑片位置不变,将开关S向d 端闭合,报警系统即可正常使用。
5G智能机器人
中国移动将 5G智能机器人如图甲所示,运用到校园环境监测中,进行红外智能测温以及校园消毒。
智能机器人配备了5台高清摄像头和红外热成像测温仪,能够在5m范围内同时扫描多达 10人的体温,如果检测到体温异常或者未带口罩,机器人会向相关人员自动发送警报。机器人当剩余电量减为电池容量的20%时,会主动寻找充电器充电。下表为某智能机器人的部分参数。
| 水箱容积 | 额定雾化量 | 行进速度 | 净重 |
| 20L | 10L/h | 0.3~0.6m/s | 102kg |
如图乙是简化的智能测温报警电路:电源电压调为18V,报警器(电阻不计)通过的电流超过10mA时就会报警,电阻箱最大阻值为999Ω,热敏电阻RT其阻值随温度升高而减小,在 37℃时是500Ω。
(1)机器人在水平路面上一边向前匀速直线运动一边喷雾状消毒液时,机器人的动能
(2)下列说法正确的是
A.高清摄像头是通过凸透镜成正立缩小的实像
B.红外测温仪工作时发出红外线射向人体再反射回测温仪内进行测温
C.机器人安装宽履带代替车轮,既为了增大摩擦,又为了减小压强
D.通过遥控器发出超声波来远程控制机器人的前进和后退
(3)若机器人的履带与地面的接触面面积是 300cm2,在装满密度为 0.9×103kg/m3的消毒液时,对水平地面的压强为
(4)当所测温度达到或超过37℃时,要求报警电路系统报警,按照下列步骤调试电路:
①电路接通前,应先将滑动变阻器滑片置于b端,再将电阻箱调到
②将开关S向c端闭合,移动滑动变阻器的滑片,直至报警系统报警,此时滑动变阻器接入电路的阻值为
③保持滑动变阻器滑片位置不变,将开关S向d 端闭合,报警系统即可正常使用。
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐2】阅读以下材料
火星,我国古代被称之为“荧惑”,是离太阳第四近的行星,直径约为地球的一半,质量约为地球的 。火星表面上,物体所受的重力与其质量的比值
。火星表面上,物体所受的重力与其质量的比值 约为3.7N/kg。火星大气以二氧化碳为主,大气密度大约只有地球的
约为3.7N/kg。火星大气以二氧化碳为主,大气密度大约只有地球的 ,平均大气压强约为700Pa。火星地表沙丘、砾石遍布,非常干燥,南北极有以固态的水和二氧化碳组成的冰盖。
,平均大气压强约为700Pa。火星地表沙丘、砾石遍布,非常干燥,南北极有以固态的水和二氧化碳组成的冰盖。
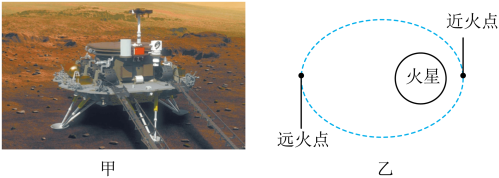
“天问一号”(该名源于屈原的《天问》),是负责执行中国首次火星探测任务的探测器,由环绕器、着陆巡视器组成。2020年7月23日,“天问一号”由“长征五号遥四”运载火箭发射升空。经历近10个月奔波,2021年5月15日,着陆巡视器与环绕器实现分离,成功软着陆于火星表面,如图甲;环绕器则于两白后进入中继通信轨道(近火点265km、远火点12500km的椭圆轨道),如图乙,为“祝融号”巡视器(火星车)建立稳定的中继通信链路,陆续传回图像数据。5月22日,“祝融号”安全驶离着陆平台,到达火星表面,开始巡视探测。
回答以下问题
(1)火箭点火后,高温高压的燃气从尾部向后喷出,从而使火箭获得向前的推力,该推力的施力物体是______ ;
(2)如图甲,着陆器四个“腿”上的“脚掌”比较宽大,这是为了______ 。
(3)在火星上,水的沸点比地球上的沸点______ ,这是火星上没有液态水的原因之一;
(4)沿椭圆轨道运行时,环绕器受______ (选填“平衡力”或“非平衡力”) 。环绕器在大气层以外运行,不受火星大气的阻力,只有动能和势能的相互转化;当它从近火点向远火点运动时,环绕器的机械能 ______ ,速度 ______ (选填“变大”“变小”或“不变” );
(5)用图,分别在地球、火星上做“探究阻力对物体运动的影响”的实验:让同一小车从斜面上滑下,使它滑到同一水平长木板上的初速度相同,则小车在火星上滑行的距离比在地球上的______ (选填“长”或“短” )。

荧惑巳至,求索无疆
火星,我国古代被称之为“荧惑”,是离太阳第四近的行星,直径约为地球的一半,质量约为地球的
。火星表面上,物体所受的重力与其质量的比值约为3.7N/kg。火星大气以二氧化碳为主,大气密度大约只有地球的,平均大气压强约为700Pa。火星地表沙丘、砾石遍布,非常干燥,南北极有以固态的水和二氧化碳组成的冰盖。“天问一号”(该名源于屈原的《天问》),是负责执行中国首次火星探测任务的探测器,由环绕器、着陆巡视器组成。2020年7月23日,“天问一号”由“长征五号遥四”运载火箭发射升空。经历近10个月奔波,2021年5月15日,着陆巡视器与环绕器实现分离,成功软着陆于火星表面,如图甲;环绕器则于两白后进入中继通信轨道(近火点265km、远火点12500km的椭圆轨道),如图乙,为“祝融号”巡视器(火星车)建立稳定的中继通信链路,陆续传回图像数据。5月22日,“祝融号”安全驶离着陆平台,到达火星表面,开始巡视探测。
回答以下问题
(1)火箭点火后,高温高压的燃气从尾部向后喷出,从而使火箭获得向前的推力,该推力的施力物体是
(2)如图甲,着陆器四个“腿”上的“脚掌”比较宽大,这是为了
(3)在火星上,水的沸点比地球上的沸点
(4)沿椭圆轨道运行时,环绕器受
(5)用图,分别在地球、火星上做“探究阻力对物体运动的影响”的实验:让同一小车从斜面上滑下,使它滑到同一水平长木板上的初速度相同,则小车在火星上滑行的距离比在地球上的
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
【推荐3】阅读短文,回答问题。
2023年9月6日下午,全球首列氢能源“智轨”电车(三编组)正式亮相马来西亚,这是我国全球首创、自主研发的一种新型绿色轨道交通工具。“智轨”电车以胶轮取代钢轮,无需铺设有形轨道,采用激光雷达感知技术、毫米波雷达感知技术等环境感知手段,获得安全防护信息。
“智轨”电车(三编组)创新采用了70MPa储氢系统和大功率燃料电池系统,还配备钛酸锂电池,用于回收制动能量,实现能量的循环利用。
“智轨”电车部分参数如下表:(三编组即三节车厢编组)
(1)激光雷达感知与毫米波感知都是通过信号发射端向环境发射电磁波,然后信号接收系统接收到来自环境_________ (选填“反射”或“折射”)回来的信号而获得车辆周边环境的信息;
(2)“智轨”电车制动时,锂电池回收制动能量的过程是_________ 能转化为电能,并最终转化为_______ ;
(3)若“智轨”电车(三编组)满载时,每个车轮接触地面面积为250cm2,则电车对水平地面的压强是________ Pa;
(4)已知某燃油公交车(满载60人),平均油耗为30L/100km,汽油的二氧化碳排放量为2.5kg/L。某两地区相距为18km,若启用“智轨”电车(三编组)替代5辆公交车运送300人时,可减少二氧化碳排放量为______ kg;(只考虑单程)
(5)已知常温条件下,氢气在70MPa压强下的密度为39.00kg/m3,氢燃料的热值为 ;若氢燃料电池的能量转化效率为50%,能耗为
;若氢燃料电池的能量转化效率为50%,能耗为 。试估算“智轨”电车(三编组)三个储氢罐最多能储存
。试估算“智轨”电车(三编组)三个储氢罐最多能储存_______ kg氢燃料:每个储氢罐的容积约为______ L;

(6)在进行“智轨”电车续航测试实验时,电车分别以35km/h和70km/h匀速直线行驶7km,已知电机功率P与汽车速度v的关系如图所示,则速度35km/h匀速直线时电车的功率为______ kW;35km/h和70km/h行驶时的能耗之比为_____ 。(电车能耗指的是消耗的能量与里程之比)
“智轨”电车
2023年9月6日下午,全球首列氢能源“智轨”电车(三编组)正式亮相马来西亚,这是我国全球首创、自主研发的一种新型绿色轨道交通工具。“智轨”电车以胶轮取代钢轮,无需铺设有形轨道,采用激光雷达感知技术、毫米波雷达感知技术等环境感知手段,获得安全防护信息。
“智轨”电车(三编组)创新采用了70MPa储氢系统和大功率燃料电池系统,还配备钛酸锂电池,用于回收制动能量,实现能量的循环利用。
“智轨”电车部分参数如下表:(三编组即三节车厢编组)
项目 | 参数 | |
车重 | 满载 | 51吨 |
最大载客量 | 100人/节 | 300人 |
储氢罐 | 每节编组 | 1个 |
车轮 | 每节编组 | 4个 |
续航 | 满氢满电综合续航 | 245km |
锂电续航 | 35km | |
(2)“智轨”电车制动时,锂电池回收制动能量的过程是
(3)若“智轨”电车(三编组)满载时,每个车轮接触地面面积为250cm2,则电车对水平地面的压强是
(4)已知某燃油公交车(满载60人),平均油耗为30L/100km,汽油的二氧化碳排放量为2.5kg/L。某两地区相距为18km,若启用“智轨”电车(三编组)替代5辆公交车运送300人时,可减少二氧化碳排放量为
(5)已知常温条件下,氢气在70MPa压强下的密度为39.00kg/m3,氢燃料的热值为
;若氢燃料电池的能量转化效率为50%,能耗为。试估算“智轨”电车(三编组)三个储氢罐最多能储存(6)在进行“智轨”电车续航测试实验时,电车分别以35km/h和70km/h匀速直线行驶7km,已知电机功率P与汽车速度v的关系如图所示,则速度35km/h匀速直线时电车的功率为
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐1】阅读短文,回答问题。
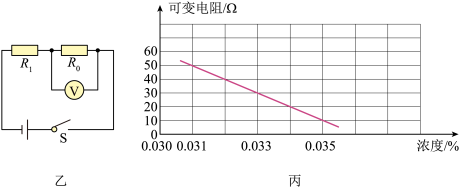
由于雾霾天气的增多,空气净化器逐渐走入家庭,其工作过程(如图甲)是:脏空气进入净化器时,灰尘被正电钨丝放电而带上正电,流到负电路栅板时,带电灰尘被吸附。此后经过活性炭层时,化学有毒气体被吸附,排出空气的污染物浓度大幅降低,多次循环后变成洁净空气。

洁净空气量(CADR)是反映其净化能力的性能指标,CADR值越大,其净化效率越高。利用CADR值,可以评估其在运行一定时间后,去除室内空气污染物的效果。按下列公式计算CADR:CADR= (V:房间容积;t:空气净化器使房间污染物的浓度下降90%运行的时间。)
(V:房间容积;t:空气净化器使房间污染物的浓度下降90%运行的时间。)
其铭牌如表:
(1)负电格栅板吸附灰尘的原理是___________ ;
(2)取出使用一段时间后的活性炭,可以闻到刺激性的气味,说明分子在___________ ;
(3)该空气净化器正常工作时的电流为___________ A;
(4)某房间的使用面积为18m2,高度是3m。此空气净化器___________ (能/不能)在1小时内使房间污染物浓度下降90%;
(5)可变电阻是制作二氧化碳传感器的常用元件,图乙为其控制电路,电源电压保持6V恒定,R1为可变电阻,其阻值随二氧化碳浓度变化如图丙,R0为定值电阻,当浓度为0.031%时,电压表示数为1V,则R0阻值为___________ Ω,当电压表示数大于3V时,二氧化碳浓度大于___________ %,此时空气净化器会自动报警。
空气净化器
由于雾霾天气的增多,空气净化器逐渐走入家庭,其工作过程(如图甲)是:脏空气进入净化器时,灰尘被正电钨丝放电而带上正电,流到负电路栅板时,带电灰尘被吸附。此后经过活性炭层时,化学有毒气体被吸附,排出空气的污染物浓度大幅降低,多次循环后变成洁净空气。
洁净空气量(CADR)是反映其净化能力的性能指标,CADR值越大,其净化效率越高。利用CADR值,可以评估其在运行一定时间后,去除室内空气污染物的效果。按下列公式计算CADR:CADR=
(V:房间容积;t:空气净化器使房间污染物的浓度下降90%运行的时间。)其铭牌如表:
规格 | 额定电压 | 频率 | 额定功率 | 洁净空气量(CADR) |
GH-2034A型 | 220V | 50HZ | 44W | 138m3/h |
(2)取出使用一段时间后的活性炭,可以闻到刺激性的气味,说明分子在
(3)该空气净化器正常工作时的电流为
(4)某房间的使用面积为18m2,高度是3m。此空气净化器
(5)可变电阻是制作二氧化碳传感器的常用元件,图乙为其控制电路,电源电压保持6V恒定,R1为可变电阻,其阻值随二氧化碳浓度变化如图丙,R0为定值电阻,当浓度为0.031%时,电压表示数为1V,则R0阻值为
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
【推荐2】阅读短文,回答问题:
教室护眼灯的外观图如图甲所示,它工作时光线柔和,基本无可视频闪,也就是在相同时间内闪烁的次数比较多,人眼几乎感觉不到,且不会产生刺眼的眩光,能有效预防近视的发生。常见的眩光类型有直接眩光、反射眩光和光幕眩光,直接眩光由灯具产生,反射眩光和光幕眩光主要由高反射物体表面产生。

教室护眼灯采用双侧发光的方式,光源放在灯具的两条长边上,发出的光由两侧的导光板向中央传播,在没有导光点的导光板上,光不能从导光板表面射出,起不到照明作用。当遇到导光板底部的导光点时,改变了光线的传播方向,由导光板正面射出,如图乙所示。最后通过扩散膜、微晶防眩板均匀射出。
教室护眼灯工作时也会产生热量,研究表明护眼灯灯珠的电阻随温度的升高而减小,图丙是温度为T1时护眼灯灯珠工作时的电流与电压的关系图像。当电路中加载一定的电压或工作电压超过某一特定值时,微小的电压变化会造成电流的急剧变化,进而导致护眼灯过度发热而损坏,因此要给护眼灯配制合理的电源进行供电。
(1)护眼灯与白炽灯在发光时相比不会产生眩光,白炽灯产生的眩光属于_______ 眩光;
(2)导光板材料主要利用了下列哪种物理属性_______ ;
A.导电性 B.导热性 C.磁性 D.透明度
(3)当护眼灯灯珠的温度由T1升高到T2时,电流与电压的关系图像应在丙图像中的_______ (填“左侧”“右侧”或“原处”);
(4)下列四种不同电源输出的电流或电压随时间变化关系的图像,最符合护眼灯灯珠工作特性要求的供电方案是_______ 。

教室护眼灯
教室护眼灯的外观图如图甲所示,它工作时光线柔和,基本无可视频闪,也就是在相同时间内闪烁的次数比较多,人眼几乎感觉不到,且不会产生刺眼的眩光,能有效预防近视的发生。常见的眩光类型有直接眩光、反射眩光和光幕眩光,直接眩光由灯具产生,反射眩光和光幕眩光主要由高反射物体表面产生。
教室护眼灯采用双侧发光的方式,光源放在灯具的两条长边上,发出的光由两侧的导光板向中央传播,在没有导光点的导光板上,光不能从导光板表面射出,起不到照明作用。当遇到导光板底部的导光点时,改变了光线的传播方向,由导光板正面射出,如图乙所示。最后通过扩散膜、微晶防眩板均匀射出。
教室护眼灯工作时也会产生热量,研究表明护眼灯灯珠的电阻随温度的升高而减小,图丙是温度为T1时护眼灯灯珠工作时的电流与电压的关系图像。当电路中加载一定的电压或工作电压超过某一特定值时,微小的电压变化会造成电流的急剧变化,进而导致护眼灯过度发热而损坏,因此要给护眼灯配制合理的电源进行供电。
(1)护眼灯与白炽灯在发光时相比不会产生眩光,白炽灯产生的眩光属于
(2)导光板材料主要利用了下列哪种物理属性
A.导电性 B.导热性 C.磁性 D.透明度
(3)当护眼灯灯珠的温度由T1升高到T2时,电流与电压的关系图像应在丙图像中的
(4)下列四种不同电源输出的电流或电压随时间变化关系的图像,最符合护眼灯灯珠工作特性要求的供电方案是
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐3】阅读短文,回答问题。
中央新风系统由风机、进风口、排风口及各种管道和接头组成。安装在吊顶内的风机通过管道与一系列排风口相连,风机启动后,室内受污染的空气经排风口及风机排往室外,使室内形成凹槽负压,这样室外新鲜空气便经进风口进入室内,从而使室内空气中二氧化碳的含量保持在占空气体积的0.03%左右。
风机转速测量原理如图甲所示。风机的风量Q指风机单位时间内排出空气的体积,风速v指风机排出空气的速度。已知风机的转速受电脑控制,与屋内空气中二氧化碳的含量ρ的平方根成正比。风机的部分参数如表一所示,风机的风速v,风量Q和空气中二氧化碳的含量ρ的关系如表二所示。


表一
表二
(1)下列有关新风系统的说法错误的是__________ ;
A.吸尘器的工作原理与新风系统原理相同
B.风机的风量与室内空间大小无关
C.风机的风量Q表示单位时间排出的空气质量
D.新风系统工作时,室内气压小于室外气压
(2)当风机以额定功率运转时:1min内排出的空气质量为__________ kg,消耗电能__________ J;此时,室内二氧化碳的含量为__________ %。当风机的风量为0.5m3/s时,风机的转速为__________ r/min;(ρ空气=1.3kg/m3)
(3)根据风机转速测量原理图,当转轴边缘和凹槽交替接近非接触式磁电传感器时,会产生一个脉冲电压,并且转速越高,脉冲电压值越大,如图乙所示,则图乙中__________ (选填“a”“b”)对应的转速高,其转速为__________ r/min;
(4)为了保持室内空气清新,小明制作了如图丙的控制风机断续工作的模拟电路,AB两端输入如图丁所示的周期性变化的电压UAB,定值电阻R=2Ω,D为电子元件,当UAB<6V时,D两端的电压UD等于输入电压;当UAB≥6V时,UD保持6V不变。当R的电功率满足PR≥2W时,风机启动工作,则t=4min时电阻R的电功率为__________ W;该电路工作60min,风机工作时间为__________ min。
中央新风系统
中央新风系统由风机、进风口、排风口及各种管道和接头组成。安装在吊顶内的风机通过管道与一系列排风口相连,风机启动后,室内受污染的空气经排风口及风机排往室外,使室内形成凹槽负压,这样室外新鲜空气便经进风口进入室内,从而使室内空气中二氧化碳的含量保持在占空气体积的0.03%左右。
风机转速测量原理如图甲所示。风机的风量Q指风机单位时间内排出空气的体积,风速v指风机排出空气的速度。已知风机的转速受电脑控制,与屋内空气中二氧化碳的含量ρ的平方根成正比。风机的部分参数如表一所示,风机的风速v,风量Q和空气中二氧化碳的含量ρ的关系如表二所示。
表一
额定转速n | 800r/min |
额定风量Q | 0.8m3/s |
额定功率P | 300W |
风速v/m•s﹣1 | 1.0 | 1.2 | 1.4 | 1.6 | 1.8 | 2.0 |
二氧化碳含量ρ/% | 0.050 | 0.072 | 0.098 | 0.162 | 0.200 | |
风量Q/ (m3•s﹣1) | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 |
A.吸尘器的工作原理与新风系统原理相同
B.风机的风量与室内空间大小无关
C.风机的风量Q表示单位时间排出的空气质量
D.新风系统工作时,室内气压小于室外气压
(2)当风机以额定功率运转时:1min内排出的空气质量为
(3)根据风机转速测量原理图,当转轴边缘和凹槽交替接近非接触式磁电传感器时,会产生一个脉冲电压,并且转速越高,脉冲电压值越大,如图乙所示,则图乙中
(4)为了保持室内空气清新,小明制作了如图丙的控制风机断续工作的模拟电路,AB两端输入如图丁所示的周期性变化的电压UAB,定值电阻R=2Ω,D为电子元件,当UAB<6V时,D两端的电压UD等于输入电压;当UAB≥6V时,UD保持6V不变。当R的电功率满足PR≥2W时,风机启动工作,则t=4min时电阻R的电功率为
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐1】阅读短文,回答问题。

如图甲所示是超市常用的一种电动搬运车,用于超市卖场与库房间的货物运输及提升。
下表是其相关参数,其电路工作原理示意图如图乙。当闭合开关S1时,提升电动机M1工作,将货物提升到指定高度。当闭合开关S2时,进退电动机M2工作,驱动搬运车前进或后退。电源是电压为36V的蓄电池组,当电池容量低于满容量的10%时,会报警提醒,返回充电座充电。电机效率是指电动机获得的有用机械能与消耗电能的比值。(g取10N/kg)
(1)搬运车既能前进又能后退,是通过改变电动机中的_____ (选填“电流方向”或“磁场方向”)来改变电动机转动方向的,搬运车在提升重物过程中主要将电能转化为_____ 。
(2)下列关于对搬运车的蓄电池的说法正确的是_____ 。
A.蓄电池充足电一次,消耗的电能约3.6×105J
B.蓄电池组充电时,电能转化为化学能
C.蓄电池放电的过程中,蓄电池相当于用电器
D.蓄电池组是由若干节蓄电池并联组成的
(3)利用搬运车将1×103kg的货物放至货架,闭合开关_____ (选填“S1”、“S2”),货物向上匀速竖直提升15s,则消耗的电能为_____ J,货物被提升了_____ m。
(4)搬运车上有显示所载货物质量的仪表,其电路如图丙所示,电源电压24V,电流表(0~0.6A),滑动变阻器R2(60Ω 1A),压敏电阻R1的阻值与所受压力F的关系如图丁所示,由电流表改装的“质量表”显示盘上的刻度在最_____ 边是最大值(选填“左”或“右”),为了确保此电路能安全工作,R2的阻值应至少调至_____ Ω,若在使用过程中不小心将R2接入电路的电阻调大,那么“质量表”显示的所载货物质量比实际值偏_____ (选填“大”或“小”)。
(5)搬运车检测到电池容量低至10%时会报警提示返回充电。若返回过程中受到的阻力为车自重的0.3倍,剩余电池容量20%的能量可供搬运车克服阻力做功,为确保搬运车能顺利返回充电,需要充电时搬运车离充电座最远_____ m。
超市电动搬运车
如图甲所示是超市常用的一种电动搬运车,用于超市卖场与库房间的货物运输及提升。
下表是其相关参数,其电路工作原理示意图如图乙。当闭合开关S1时,提升电动机M1工作,将货物提升到指定高度。当闭合开关S2时,进退电动机M2工作,驱动搬运车前进或后退。电源是电压为36V的蓄电池组,当电池容量低于满容量的10%时,会报警提醒,返回充电座充电。电机效率是指电动机获得的有用机械能与消耗电能的比值。(g取10N/kg)
| 型号 | 自重 | 最大载货量 | 蓄电池电压 | 蓄电池容量 | 提升电机 额定电压 /额定功率 | 进退电机 额定电压 /额定功率 | 电机 效率 |
| PTE20X | 0.4t | 2t | 36V | 100Ah | 36V/800W | 36V/900W | 80% |
(2)下列关于对搬运车的蓄电池的说法正确的是
A.蓄电池充足电一次,消耗的电能约3.6×105J
B.蓄电池组充电时,电能转化为化学能
C.蓄电池放电的过程中,蓄电池相当于用电器
D.蓄电池组是由若干节蓄电池并联组成的
(3)利用搬运车将1×103kg的货物放至货架,闭合开关
(4)搬运车上有显示所载货物质量的仪表,其电路如图丙所示,电源电压24V,电流表(0~0.6A),滑动变阻器R2(60Ω 1A),压敏电阻R1的阻值与所受压力F的关系如图丁所示,由电流表改装的“质量表”显示盘上的刻度在最
(5)搬运车检测到电池容量低至10%时会报警提示返回充电。若返回过程中受到的阻力为车自重的0.3倍,剩余电池容量20%的能量可供搬运车克服阻力做功,为确保搬运车能顺利返回充电,需要充电时搬运车离充电座最远
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐2】阅读材料,回答问题。
某智能扫地机器人(如图甲)可通过灰尘传感器自动寻找灰尘清扫,通过电动机旋转、产生高速气流将灰尘等吸入集尘盒。机器人其部分工作参数:
其内部有一光敏电阻Rp,其阻值随光照强度变化Rp-E图象如图乙(E表示光照强度,光照强度越强E值越大,其单位为cd,读作坎德拉)。机器人接通电源工作时,当清扫到一定程度,地面灰尘减少,使照射到光敏电阻上的光照强度增强,光敏电阻Rp减小,电磁铁吸引衔铁,指示灯亮。图丙为其不完善的工作电路原理图。
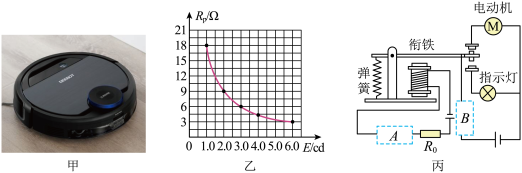
(1)由乙图像可知,光敏电阻的阻值Rp与光照强度E之间的关系是__________ ;
(2)在机器人电路原理图中,光敏电阻应连在__________ 处(选填A或B),当地面灰尘多时,使照射到光敏电阻上的光照强度减小,光敏电阻Rp增大,通过电磁铁的电流__________ ,电磁铁释放衔铁,电动机工作;
(3)充满电后电池储存的电能为__________ J,在电池内部剩余30%的电能时,小东立刻给机器人充电,同时机器人还继续正常工作,机器人最多能持续正常工作__________ 小时。
电磁继电器与扫地机器人
某智能扫地机器人(如图甲)可通过灰尘传感器自动寻找灰尘清扫,通过电动机旋转、产生高速气流将灰尘等吸入集尘盒。机器人其部分工作参数:
××智能扫地机器人 | |||
正常充电电压 | 12V | 额定功率 | 40W |
充电时的电流 | 2.5A | 工作噪声 | <50dB |
正常充电电压下充满电所需时间 | 1h | ||
(1)由乙图像可知,光敏电阻的阻值Rp与光照强度E之间的关系是
(2)在机器人电路原理图中,光敏电阻应连在
(3)充满电后电池储存的电能为
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
名校
解题方法
【推荐3】阅读材料,回答问题
2021年,某公司发布了一款航拍无人机(如题图甲所示)。该无人机最大上升速度可达8m/s,最大下降速度可达6m/s,让航拍变得高效。该无人机通过减小风阻和增大电池容量增强了续航能力,供电电压为14V的锂电池容量从3.85A·h提高到5A·h,并支持80W的充电功率,充电电压为20V,续航时间提升到了46分钟,真正突破了30分钟的桎梏,实现了“鱼跃”式的提升:

(1)“比值定义法”是物理学中常用的定义新物理量的方法,我们可以用速度变化量Δv与发生这一变化所用时间Δt的比值来描述速度变化的快慢,若无人机从静止开始直线上升,至达到最大上升速度,用时10s,则该无人机的速度变化量Δv为______ m/s,速度的变化快慢为______ m/s2;
(2)题图乙是该无人机在某次飞行时做功的情况,请据此在题图丙中画出其0~4s的功率一时间(P—t)图像______ ;
(3)现在的锂电池容量有两种标注方式。一种是mA·h,表示充满电后以该电流持续对外供电1h就把电池的电能释放完;另一种是W·h;表示充满电后以该功率对外供电1h就把电池的电能释放完。该无人机的电池如果用W·h来标注,应该为______ W·h;
(4)理论证明,电池充电时间t、电池容量和充电电流存在以下关系:t=1.2×电池容量÷充电电流。若把无电状态的该无人机电池充满电,需要______ h。充满电后电池储存的能量与充电时消耗的电能的比值叫作充电效率,则该电池充电的效率为______ 。
航拍无人机
2021年,某公司发布了一款航拍无人机(如题图甲所示)。该无人机最大上升速度可达8m/s,最大下降速度可达6m/s,让航拍变得高效。该无人机通过减小风阻和增大电池容量增强了续航能力,供电电压为14V的锂电池容量从3.85A·h提高到5A·h,并支持80W的充电功率,充电电压为20V,续航时间提升到了46分钟,真正突破了30分钟的桎梏,实现了“鱼跃”式的提升:
(1)“比值定义法”是物理学中常用的定义新物理量的方法,我们可以用速度变化量Δv与发生这一变化所用时间Δt的比值来描述速度变化的快慢,若无人机从静止开始直线上升,至达到最大上升速度,用时10s,则该无人机的速度变化量Δv为
(2)题图乙是该无人机在某次飞行时做功的情况,请据此在题图丙中画出其0~4s的功率一时间(P—t)图像
(3)现在的锂电池容量有两种标注方式。一种是mA·h,表示充满电后以该电流持续对外供电1h就把电池的电能释放完;另一种是W·h;表示充满电后以该功率对外供电1h就把电池的电能释放完。该无人机的电池如果用W·h来标注,应该为
(4)理论证明,电池充电时间t、电池容量和充电电流存在以下关系:t=1.2×电池容量÷充电电流。若把无电状态的该无人机电池充满电,需要
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐1】阅读短文,回答问题。
电动汽车是环保的交通工具(如图甲所示),行驶时蓄电池给电动机供电,电动汽车的主要部分参数如表所示。在某次测试过程中,司机和一名陪同人员上车。司机驾驶该充满电的汽车以节电模式匀速行驶30km后,电池剩余容量为58kW•h,陪同人员负责记录测试数据。汽车匀速行驶时所受阻力为总重力的6%。

(1)为了节能,汽车靠近目的地前可采用“再生制动”的方法:在车速逐渐减到60km/h的过程中,不采用机械刹车,由于电动汽车继续行驶,带动电机逆向发电,将电能存储在蓄电池内,此时电机的工作原理是______ ;
(2)汽车刹车原理图如图乙所示,连着刹车踏板的金属杆可视为一根能绕O点转动的______ (选填“省力”“等臂”或“费力”)杠杆;
(3)在此测试过程中,汽车匀速行驶30km,牵引力做的功为______ J,该汽车将电能转化为机械能的效率为______ %;(g=10N/kg)
(4)如图丙是小明设计的车速提醒电路,R为定值电阻,Rv的阻值随车速的变化而改变。当电压表的示数达到某一数值时提醒驾驶员车速过快,需要减速。图丁是电阻Rv的阻值与车速关系的图像,图戊是车速从0加速到100km/h过程中,Rv消耗的电功率随电流变化的图像。则图丙中定值电阻R的阻值为______ Ω;车速为0时,Rv消耗的电功率为______ W。

电动汽车
电动汽车是环保的交通工具(如图甲所示),行驶时蓄电池给电动机供电,电动汽车的主要部分参数如表所示。在某次测试过程中,司机和一名陪同人员上车。司机驾驶该充满电的汽车以节电模式匀速行驶30km后,电池剩余容量为58kW•h,陪同人员负责记录测试数据。汽车匀速行驶时所受阻力为总重力的6%。
| 测试时车和人的总质量 | 1500kg |
| 蓄电池最大容量 | 68kW•h |
| 最高车速 | 120km/h |
| 最大功率 | 90kW |
(1)为了节能,汽车靠近目的地前可采用“再生制动”的方法:在车速逐渐减到60km/h的过程中,不采用机械刹车,由于电动汽车继续行驶,带动电机逆向发电,将电能存储在蓄电池内,此时电机的工作原理是
(2)汽车刹车原理图如图乙所示,连着刹车踏板的金属杆可视为一根能绕O点转动的
(3)在此测试过程中,汽车匀速行驶30km,牵引力做的功为
(4)如图丙是小明设计的车速提醒电路,R为定值电阻,Rv的阻值随车速的变化而改变。当电压表的示数达到某一数值时提醒驾驶员车速过快,需要减速。图丁是电阻Rv的阻值与车速关系的图像,图戊是车速从0加速到100km/h过程中,Rv消耗的电功率随电流变化的图像。则图丙中定值电阻R的阻值为
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
解题方法
【推荐2】阅读材料,回答问题。
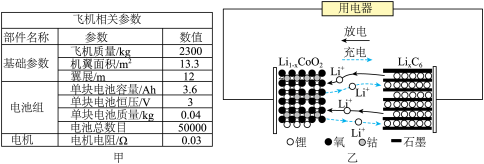
某型eVTOL飞行器的相关参数如图甲。相对于传统的民航飞机,eVTOL飞行器可以实现垂直起降,其典型任务包括起飞、巡航、悬停、降落。
eVTOL飞行器以锂离子电池组为能源,锂离子电池充放电原理如图乙。功率密度是指电池组输出的功率与整个电池组质量的比值,一般使用最大功率密度(W/kg)描述电池输出功率的能力。________ (选填“大于”、“等于”或“小于”)飞行器的重力。民航飞机 在该阶段获得升力的原理是________ (选填“流体压强与流速的关系”或“相互作用力”)。
(2)单块锂离子电池充满电储存的电能为________ kW•h。在锂离子电池放电工作时,将________ 能转化为电能,________ (选填“ ”或“
”或“ ”)是负极材料。
”)是负极材料。
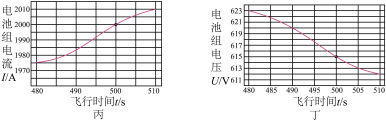
(3)电池组电压和电流在不同飞行时间下的具体数值如图所示,飞机在起飞后第480秒到510秒都处于悬停阶段,悬停时输出功率近似不变 。飞行器悬停阶段,电路中总电阻随时间不断________ (选填“增大”或“减小”),悬停阶段功率密度为________ W/kg。________ 个这样的电热水壶(如下图)把水烧开,已知电热水壶均装满初温是20°C的水,环境在一个标准大气压下, 。
。
深圳“空中的士”
2024年2月,被称为“空中的士”的eVTOL航空器从深圳到珠海仅仅用时20min,标志着全球跨海电动航空器的首次飞行成功。某型eVTOL飞行器的相关参数如图甲。相对于传统的民航飞机,eVTOL飞行器可以实现垂直起降,其典型任务包括起飞、巡航、悬停、降落。
eVTOL飞行器以锂离子电池组为能源,锂离子电池充放电原理如图乙。功率密度是指电池组输出的功率与整个电池组质量的比值,一般使用最大功率密度(W/kg)描述电池输出功率的能力。
(2)单块锂离子电池充满电储存的电能为
”或“”)是负极材料。(3)电池组电压和电流在不同飞行时间下的具体数值如图所示,飞机在起飞后第480秒到510秒都处于悬停阶段,悬停时输出功率
。
您最近一年使用:0次
科普阅读题
|
较难
(0.4)
名校
解题方法
【推荐3】阅读短文,回答问题。
无侦﹣10是中国研制的一款高空隐形察打一体无人机,搭载新一代涡扇发动机,飞行速度可达300m/s,战场响应快。飞机采用以光纤传输信号的光传操纵系统。该机最大起飞重量3.2吨,主要用于电子侦察,对敌方信号进行侦查和定位,载弹量要逊色一些,只有400kg。翼载指飞机的最大起飞质量与机翼面积的比值;热效率是指发动机获得的机械能与燃料完全燃烧产生的内能之比,而推进效率则是指发动机传递给飞机的推进功(推力所做的功)与其获得的机械能之比,飞机航行时所受阻力与速度的关系见表一,部分技术参数见表二。(g取10N/kg)
表一:
表二:
(1)飞机光传操纵系统中的传输媒介是 ___________ (选填“导体”“绝缘体”或“半导体”);飞机表面能 ___________ (选填“反射”或“吸收”)对方雷达发射的电磁波从而实现隐身;
(2)关于无人机,下列说法中不正确的___________ ;
①遥控无人机是通过电磁波来传递信息的
②机翼做成流线型是为了减小空气的阻力
③当飞机顺风起飞时,更有利于飞机升空
④飞机在一定高度匀速飞行投弹时机械能变小
(3)飞机的推重比是指飞机以最大航行速度匀速飞行时的推力与最大起飞重力的比值,则无侦﹣10的推重比约为___________ %(保留整数);
(4)该飞机的翼载为500kg/m2,则机翼面积为___________ m2。当飞机以200m/s的速度沿水平方向正常巡航0.5h,耗油 ___________ kg;
(5)为保证飞行安全,当飞机降低到一定高度时开启警示灯。如图乙是小明设计的模拟电路(电源电压恒定),压敏电阻R与离地高度h的关系见表三。
表三:
当飞机降低到距地面450m时,开关S闭合警示灯亮,灵敏电流计示数为0.02A;当飞机距地面400m时,灵敏电流计示数为0.04A;当飞机距地面150m时,警示灯开始明暗交替变化。应将压敏电阻R串联在图乙电路中的 ___________ (选择“A”或“B”)位置,另一位置接入灵敏电流计(高度表)。当警示灯处于较暗状态时的电功率是 ___________ W(电磁铁线圈、衔铁电阻忽略不计,警示灯电阻不随温度变化)。

察打一体无人机
无侦﹣10是中国研制的一款高空隐形察打一体无人机,搭载新一代涡扇发动机,飞行速度可达300m/s,战场响应快。飞机采用以光纤传输信号的光传操纵系统。该机最大起飞重量3.2吨,主要用于电子侦察,对敌方信号进行侦查和定位,载弹量要逊色一些,只有400kg。翼载指飞机的最大起飞质量与机翼面积的比值;热效率是指发动机获得的机械能与燃料完全燃烧产生的内能之比,而推进效率则是指发动机传递给飞机的推进功(推力所做的功)与其获得的机械能之比,飞机航行时所受阻力与速度的关系见表一,部分技术参数见表二。(g取10N/kg)
表一:
速度v/(m/s) | 100 | 150 | 200 |
阻力f/N | 500 | 1125 | 2000 |
热效率η1 | 推进效率η2 | 航空燃油的热值q |
40% | 60% |
|
 J/kg
J/kg(2)关于无人机,下列说法中不正确的
①遥控无人机是通过电磁波来传递信息的
②机翼做成流线型是为了减小空气的阻力
③当飞机顺风起飞时,更有利于飞机升空
④飞机在一定高度匀速飞行投弹时机械能变小
(3)飞机的推重比是指飞机以最大航行速度匀速飞行时的推力与最大起飞重力的比值,则无侦﹣10的推重比约为
(4)该飞机的翼载为500kg/m2,则机翼面积为
(5)为保证飞行安全,当飞机降低到一定高度时开启警示灯。如图乙是小明设计的模拟电路(电源电压恒定),压敏电阻R与离地高度h的关系见表三。
表三:
高度h/m | 150 | 400 | 450 |
电阻R/Ω | 20 | 50 | 200 |
您最近一年使用:0次


