解题方法
1 . 如图,凸透镜的焦距为2.0dm, 是物体MN通过凸透镜所成的像,b、c是由M点发出通过凸透镜后的两条光线。
是物体MN通过凸透镜所成的像,b、c是由M点发出通过凸透镜后的两条光线。( )
(2)相对于物体,像是的___________ (选填“正立”或“倒立”)、___________ (选填“放大”或“缩小”)的___________ (选填“虚”或“实”)像。
是物体MN通过凸透镜所成的像,b、c是由M点发出通过凸透镜后的两条光线。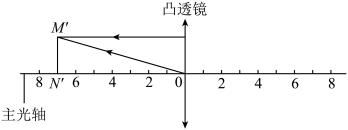
(2)相对于物体,像
是的
您最近一年使用:0次
2 . 小明参加暑期沿海地区户外活动。下列物理知识解释相应户外生存技能有误的是( )
| A.罗盘辨向——地球有地磁场 | B.削竹为刀——减面积增压强 |
| C.夏风辨向——水的比热容大 | D.水珠取火——凹透镜能聚光 |
您最近一年使用:0次
名校
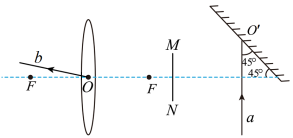
3 . 如图,凸透镜的焦点为F:
(1)如图请做出光线a经平面镜反射和凸透镜折射后的光路图_________ ;
(2)MN为凸透镜前的一个发光物体,b为MN上某点P发出的一条光线通过凸透镜光心O后的光路。
①通过作图找出MN上P点并标出其位置_________ ;
②MN经过透镜所成的是_________ (选填“倒立”“正立”)、_________ (选填“放大”、“缩小”)的像;
③若MN向上移动,则经过凸透镜成的像将向_________ 移动(选填“上”、“下”)。
(1)如图请做出光线a经平面镜反射和凸透镜折射后的光路图
(2)MN为凸透镜前的一个发光物体,b为MN上某点P发出的一条光线通过凸透镜光心O后的光路。
①通过作图找出MN上P点并标出其位置
②MN经过透镜所成的是
③若MN向上移动,则经过凸透镜成的像将向
您最近一年使用:0次
4 . 如图所示的发光棒MN放在凸透镜前, 处为凸透镜光心,点N发出的光线a平行于主光轴。
处为凸透镜光心,点N发出的光线a平行于主光轴。__________  ;
;
(2)画出光线b、c经过凸透镜折射后的光线;__________
(3)发光棒MN高 ,经凸透镜成像,像高可能是
,经凸透镜成像,像高可能是__________ (选填“ ”、“”或“
”、“”或“ ”)。
”)。
处为凸透镜光心,点N发出的光线a平行于主光轴。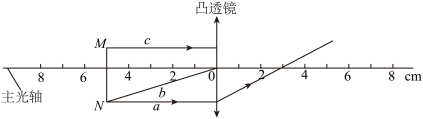
;(2)画出光线b、c经过凸透镜折射后的光线;
(3)发光棒MN高
,经凸透镜成像,像高可能是”、“”或“”)。
您最近一年使用:0次
5 . 关于常见的光学仪器或光学应用,下列说法正确的是( )
| A.校园内安装的监控摄像头,跟手机镜头的成像原理不相同 |
| B.焦距越小的凸透镜,对光的会聚作用越弱 |
| C.为矫正近视眼,要用适当的凹透镜做成眼镜镜片 |
| D.自行车的尾灯能对夜间行车人起到一定的安全保护作用,它利用了光的折射 |
您最近一年使用:0次
6 . 如图所示,激光笔发出的光通过焦点 F 射向透镜,请画出从透镜射出的光。

您最近一年使用:0次
名校
解题方法
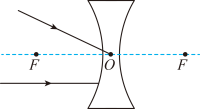
7 . 如题图所示,F为凹透镜的焦点,O为光心。请将光路图补充完整。
您最近一年使用:0次
2024-06-17更新
|
356次组卷
|
2卷引用:2024年广东省中山市万阅百校联盟中考三模物理试题
8 . 阅读短文,回答问题:
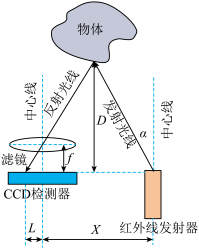
CCD检测器能将测得的光信号转化为电信号,电信号的大小叫做探测器的输出值,输出值与偏移值L成正比,当然有例外,当D很小时,L值较大,光点可能超出探测器的探测范围,即L超过某一值时,输出值会随着L的增大而快速变小,直至变为零:当D很大时,L值又会很小,这时检测器能否分辨得出这个很小的L值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值,要检测越远的物体,CCD的分辨率要求就越高,所以通常的探测器只能在一定的范围内有效测量距离D。___________ (反射/折射);
(2)下列说法不正确的是___________ 。
A.滤镜对光线有会聚作用
B.CCD检测器可以将光能转化为电能
C.扫地机器人在工作过程中偏移量L逐渐变大,说明扫地机器人在远离障碍物
D.甲探测范围 ,乙探测范围
,乙探测范围 ,则甲的CCD检测器分辨率较低
,则甲的CCD检测器分辨率较低
(3)扫地机器人的红外发射器与墙壁之间的距离为 ,现以
,现以 的速度沿垂直墙壁方向匀速向墙壁靠近,当红外传感器探测到与墙壁之间的距离为
的速度沿垂直墙壁方向匀速向墙壁靠近,当红外传感器探测到与墙壁之间的距离为 时,立即停止靠近,则扫地机器人的运动时间为
时,立即停止靠近,则扫地机器人的运动时间为___________  ;
;
(4)如图,已知f=8cm,X=20cm,若某次探测时 ,则此时红外传发射器与障碍物之间的距离为
,则此时红外传发射器与障碍物之间的距离为___________ ;
(5)文中所述的红外探测器的输出值与到物体的距离D的关系图像大致为___________ 。
扫地机器人的“眼睛”
扫地机器人能自动避开障碍物,目前市面上大部分机型使用的是红外探测器作为“眼睛”。红外探测器测距的原理如图所示,红外发射器以一定的角度发射红外光束,光束遇到物体被反射,再通过有滤光作用的凸透镜后照射到CCD检测器上的某一位置,该位置不在透镜的主光轴(中心线)上,偏离的距离叫偏移值L。根据几何关系可知:物体离传感器越远,L就越小。在知道了偏移值L两中心线间距X以及滤镜的焦距f后,可以计算得到距离D,也就知道物体有多远了。CCD检测器能将测得的光信号转化为电信号,电信号的大小叫做探测器的输出值,输出值与偏移值L成正比,当然有例外,当D很小时,L值较大,光点可能超出探测器的探测范围,即L超过某一值时,输出值会随着L的增大而快速变小,直至变为零:当D很大时,L值又会很小,这时检测器能否分辨得出这个很小的L值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值,要检测越远的物体,CCD的分辨率要求就越高,所以通常的探测器只能在一定的范围内有效测量距离D。
(2)下列说法不正确的是
A.滤镜对光线有会聚作用
B.CCD检测器可以将光能转化为电能
C.扫地机器人在工作过程中偏移量L逐渐变大,说明扫地机器人在远离障碍物
D.甲探测范围
,乙探测范围,则甲的CCD检测器分辨率较低(3)扫地机器人的红外发射器与墙壁之间的距离为
,现以的速度沿垂直墙壁方向匀速向墙壁靠近,当红外传感器探测到与墙壁之间的距离为时,立即停止靠近,则扫地机器人的运动时间为;(4)如图,已知f=8cm,X=20cm,若某次探测时
,则此时红外传发射器与障碍物之间的距离为;(5)文中所述的红外探测器的输出值与到物体的距离D的关系图像大致为
A. 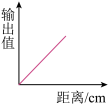 B.
B. 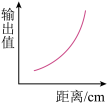
C. 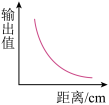 D.
D.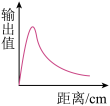
您最近一年使用:0次
解题方法
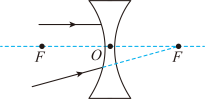
9 . 如图所示,请根据两条入射光线分别画出经过凹透镜折射后的光线。
您最近一年使用:0次
解题方法
10 . 下列是同学们所画的示意图,其中正确的是( )
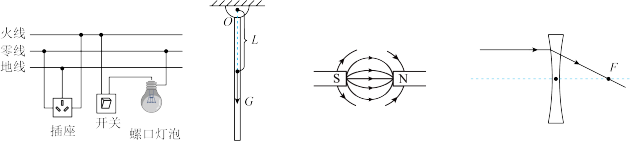
| A.家庭电路的部分连接情况 | B.杠杆重力的力臂L |
| C.异名磁极间的磁感线分布情况 | D.凹透镜对光线的作用 |
您最近一年使用:0次


