2023年5月11日,武汉光谷磁悬浮空中轨道列车试乘发车,如图1所示,光谷空轨列车预计在今年内开通运营,将成为国内首条开通运营的空轨线路,对于打造流动的“空中观景平台”,探索绿色低碳城市轨道交通新形势有着重要意义。
(1)乘客乘坐空中列车欣赏城市景色时,他以__________ (填“路旁房屋”或“空中轨道列车”)为参照物时,发现景物在运动,远处景物在眼睛的视网膜上成__________ ;(填“倒立缩小实像”、“倒立放大实像”、“正立缩小实像”或“正立放大虚像”)
(2)某种非磁悬浮空中轨道列车总质量为20吨,与水平轨道接触的总面积约为1600cm2,则列车静止对轨道的压强为多少_________ ?
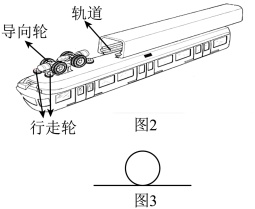
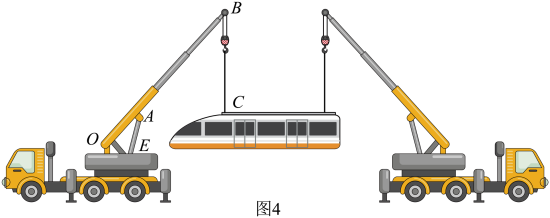
(3)该非磁悬浮列车在行走过程中,行走轮始终与轨道接触并为列车提供动力,导向轮控制方向,避免列车脱轨。从运行机理上来说,空中列车依旧是车轮滚动带着车辆前行,如图2所示。若将行走轮和轨道简化为图3所示模型,当空中列车在水平向右行驶时,在图3中画出行走轮受到轨道施加的摩擦力的示意图_________ ;
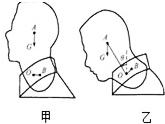
(4)空中轨道列车在试乘前,需要利用2台大型起重机将列车吊到轨道的下方,如图4所示。OB表示起重机的起重臂,它通过钢缆将列车吊起,EA表示液压杆,它对起重臂有支撑作用,已知OA长度为4m,OB长度为10m,EA长度为3m,且O到液压杆EA的距离为2m,到BC的距离为6m,起重机将总质量为20吨的列车吊在空中静止时,液压杆EA对起重臂OB施加力的大小大约是多少_________ ?(起重臂OB的重力忽略不计)
(1)乘客乘坐空中列车欣赏城市景色时,他以
(2)某种非磁悬浮空中轨道列车总质量为20吨,与水平轨道接触的总面积约为1600cm2,则列车静止对轨道的压强为多少
(3)该非磁悬浮列车在行走过程中,行走轮始终与轨道接触并为列车提供动力,导向轮控制方向,避免列车脱轨。从运行机理上来说,空中列车依旧是车轮滚动带着车辆前行,如图2所示。若将行走轮和轨道简化为图3所示模型,当空中列车在水平向右行驶时,在图3中画出行走轮受到轨道施加的摩擦力的示意图
(4)空中轨道列车在试乘前,需要利用2台大型起重机将列车吊到轨道的下方,如图4所示。OB表示起重机的起重臂,它通过钢缆将列车吊起,EA表示液压杆,它对起重臂有支撑作用,已知OA长度为4m,OB长度为10m,EA长度为3m,且O到液压杆EA的距离为2m,到BC的距离为6m,起重机将总质量为20吨的列车吊在空中静止时,液压杆EA对起重臂OB施加力的大小大约是多少

更新时间:2023/06/16 18:15:44
|
相似题推荐
综合题
|
适中
(0.65)
名校
解题方法
【推荐1】电动清扫车以其环保、高效等优点,在创建卫生城市中大显身手。如图为一电动清扫车正在工作时的情景。
(1)电动清扫车的主要部件是电动机,其工作原理是___________ ;
(2)清扫车停在水平路面上,总质量为800kg,清扫刷与路面不接触,车对路面的压强为多少(g取10N/kg)?( )
(3)清扫车完成任务后,在平直道路上以5m/s的速度匀速直线行驶,经10min到达垃圾处理站,行驶过程中车所受阻力大小恒为400N,则牵引力做的功和功率分别为多少?( )

(1)电动清扫车的主要部件是电动机,其工作原理是
(2)清扫车停在水平路面上,总质量为800kg,清扫刷与路面不接触,车对路面的压强为多少(g取10N/kg)?
(3)清扫车完成任务后,在平直道路上以5m/s的速度匀速直线行驶,经10min到达垃圾处理站,行驶过程中车所受阻力大小恒为400N,则牵引力做的功和功率分别为多少?
| 质量m/kg | 40 |
| 行驶过程中每个轮胎与地面接触的面积S/m2 | 4×10﹣3 |
| 电能转化为机械能的效率η | 75% |
| 工作电压U/V | 48 |
| 规定行驶速度v/km•h﹣1 | ≤36 |
您最近一年使用:0次
综合题
|
适中
(0.65)
解题方法
【推荐2】如图甲是小勇研究弹簧测力计的示数F与物体下表面离水面的距离h的关系实验装置。其中A是底面积为25cm2的实心均匀圆柱形物体。用弹簧测力计提着物体A,使其缓慢浸入水中(水未溢出),得到F与h的关系图像如图乙中实线所示。(g取10N/kg)_________ N,将它放在水平桌面上时对桌面的压强为_________ Pa。
(2)浸没前,在物体A逐渐浸入水的过程中,水对容器底部压强_________ 。浸没时受到水的浮力为_______ 。
(3)完全浸没时,A受到水的浮力_________ N,体积为_________ cm3,密度为_________ kg/m3。
(4)已知容器底面积为100cm2,A浸水中后,容器对水平桌面的压强增大_________ Pa。
(5)小勇换用另一种未知液体重复上述实验并绘制出图乙虚线所示图像,则该液体密度为__________ kg/m3。

(2)浸没前,在物体A逐渐浸入水的过程中,水对容器底部压强
(3)完全浸没时,A受到水的浮力
(4)已知容器底面积为100cm2,A浸水中后,容器对水平桌面的压强增大
(5)小勇换用另一种未知液体重复上述实验并绘制出图乙虚线所示图像,则该液体密度为
您最近一年使用:0次
综合题
|
适中
(0.65)
解题方法
【推荐3】阅读材料,回答问题。
智能机器人常被用于校园红外测温及校园消毒(如图甲所示)。机器人配备了3台高清摄像头和红外热成像测温仪,若检测到人体温度异常,机器人会发出警报信号。机器人上还安装了超声波雾化器自动喷枪,将消毒液雾化后再吹散到空气中进行消杀。当剩余电量不足时,机器人会主动寻找充电器充电,电池在充电时相当于用电器,在工作时相当于电源。如图乙是它简化的智能测温报警电路,报警器电阻不计,热敏电阻RT的阻值随温度变化规律如图丙所示。如表为智能机器人的部分参数:

(1)机器人满载消毒液静止在水平地面时对地面的压强是______ Pa(g取10N/kg);
(2)机器人电量不足时,它会以最大速度朝着充电器匀速直线前进,在匀速直线前进的过程中,机器人受到动力与阻力是一对______ (填“平衡力”或“相互作用力”),如果它距离充电器72m,则到达充电器需要______ min;
(3)以下机器人工作的原理中正确的是______ (单选题);
A.高清摄像头利用了凸透镜成倒立缩小实像的原理
B.红外测温仪工作时发出红外线射向人体再反射回测温仪内进行测温
C.在水平路面上匀速行驶的机器人正在喷雾消毒时,其动能不变
(4)当所测温度达到或超过37.3℃时,要求报警电路系统报警,则闭合开关前,应该将滑动变阻器的阻值调到______ Ω;
(5)红外线测温仪测量的是人体皮肤表面的温度,而人体皮肤表面温度比腋下温度要略低,所以要将该电路报警温度调低一点,应将滑动变阻器的滑片向______ (选填“左”或“右”)移动。
智能机器人
智能机器人常被用于校园红外测温及校园消毒(如图甲所示)。机器人配备了3台高清摄像头和红外热成像测温仪,若检测到人体温度异常,机器人会发出警报信号。机器人上还安装了超声波雾化器自动喷枪,将消毒液雾化后再吹散到空气中进行消杀。当剩余电量不足时,机器人会主动寻找充电器充电,电池在充电时相当于用电器,在工作时相当于电源。如图乙是它简化的智能测温报警电路,报警器电阻不计,热敏电阻RT的阻值随温度变化规律如图丙所示。如表为智能机器人的部分参数:
电池充电电压 | 20V | 电池工作电压 | 18V |
电池容量 | 4000mAh | 行进速度 | 0.3~0.5m/s |
报警电流 | ≥30mA | 底座与地接触面积 | 25cm2 |
满载时消毒液质量 | 10kg | 空载净重 | 20kg |
(2)机器人电量不足时,它会以最大速度朝着充电器匀速直线前进,在匀速直线前进的过程中,机器人受到动力与阻力是一对
(3)以下机器人工作的原理中正确的是
A.高清摄像头利用了凸透镜成倒立缩小实像的原理
B.红外测温仪工作时发出红外线射向人体再反射回测温仪内进行测温
C.在水平路面上匀速行驶的机器人正在喷雾消毒时,其动能不变
(4)当所测温度达到或超过37.3℃时,要求报警电路系统报警,则闭合开关前,应该将滑动变阻器的阻值调到
(5)红外线测温仪测量的是人体皮肤表面的温度,而人体皮肤表面温度比腋下温度要略低,所以要将该电路报警温度调低一点,应将滑动变阻器的滑片向
您最近一年使用:0次
综合题
|
适中
(0.65)
解题方法
【推荐1】机械手臂是机器人技术领域中的自动化机械装置,能够接受指令,完成抓取、伸缩、旋转和升降等动作。某实验小组制作了如图甲所示的机械手臂模型,并安装在一辆小车上,其结构简图如图乙所示:工作时安装在小车上的底座可以在水平面内自由旋转,产柱和横臂可以在竖直面内自由旋转,手爪可以抓取不同方向、不同高度的物体。______ 杠杆,同时拉动两根细线手爪就可夹住物体,利用C点产生的______ 力将物体举高。为防止手爪在夹物体时给物体造成伤害,可以增大C点处的______ 。
(2)如图丁所示,电控组件的质量为500g,忽略小车、底座、产柱、横臂和手爪的重力,相关参数如图所示(单位:cm),当机械手臂产柱竖直、横臂水平没有抓取物块时,为防止小车轮子脱离地面,所加配重至少为______ N。当此机械臂抓取正前方一个质量为200g的金属块,将其举高20cm,对金属块做功为______ J,在加上最小配重后,在产柱竖直,横臂最终水平状态下,为防止在抓取过程中小车轮子脱离地面,抓取物体的最大重力为______ N。在不增加器材的情况下,要想横臂最终保持水平位置并增加抓取物体的最大重力,可行的方法是:______ 。(g取10N/kg)

(2)如图丁所示,电控组件的质量为500g,忽略小车、底座、产柱、横臂和手爪的重力,相关参数如图所示(单位:cm),当机械手臂产柱竖直、横臂水平没有抓取物块时,为防止小车轮子脱离地面,所加配重至少为
您最近一年使用:0次
综合题
|
适中
(0.65)
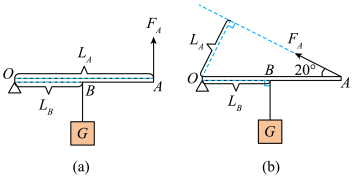
【推荐2】“低头族”长时间低头看手机,会引起颈部肌肉损伤.当头颅为竖直状态时,颈部肌肉的拉力为零,当头颅低下时,颈部肌肉会产生一定的拉力.为了研究颈部肌肉的拉力与低头角度大小的关系,我们可以建立一个头颅模型来模拟实验.如图甲所示,把人的颈椎简化成一个支点O,用1kg的头颅模型在重力作用下绕着这个支点O转动,A点为头颅模型的重心,B点为肌肉拉力的作用点.将细线的一端固定在B点,用弹簧测力计拉着细线模拟测量肌肉的拉力,头颅模型在转动过程中,细线拉力的方向始终垂直于OB,如图乙所示,让头颅模型从竖直状态开始转动,通过实验记录出低头角度θ及细线拉力F的数据,如表:
(1)设头颅质量为8kg,当低头角度为60°时,颈部肌肉实际承受的拉力是 N.
(2)在图乙中画出细线拉力的示意图.
(3)请解释:为什么低头角度越大,颈部肌肉的拉力会越大?答 .
(4)请你就预防和延缓颈椎损伤提出一个合理化的建议: .
| 低头角度θ/° | 0 | 15 | 30 | 45 | 60 |
| 细线拉力F/N | 0 | 7.3 | 14.0 | 20.2 | 25.0 |
(1)设头颅质量为8kg,当低头角度为60°时,颈部肌肉实际承受的拉力是 N.
(2)在图乙中画出细线拉力的示意图.
(3)请解释:为什么低头角度越大,颈部肌肉的拉力会越大?答 .
(4)请你就预防和延缓颈椎损伤提出一个合理化的建议: .
您最近一年使用:0次
综合题
|
适中
(0.65)
【推荐3】在如图 (a)所示装置中,杠杆 OA 在水平位置平衡,OA=50 厘米,B 为 OA 的中点,物体 G重 200 牛,可在 A 点沿不同方向施加作用力 FA,则:
(1)作用在 A 点的最小的力的大小为_____ 牛?方向_______
(2)有小虹、小杨两位同学用作图法进一步分析 FA 大小时发现,如图 (a)(b)所示, 小虹认为:当 FA 与杠杆 OA 的夹角为 90°时,lA>lB,为省力杠杆; 小杨认为:当 FA 与杠杆 OA 的夹角为 20°时,lA<lB,为费力杠杆;
①请判断:就他们设想的角度而言,小虹的结论是_____ 小杨的结论是___ (均选填“正确”或“错误”)
②请你根据所学的数学知识猜想,是否有可能存在 FA 与杠杆 OA 的夹角为θ时,该杠杆为等 臂杠杆?若有,则θ角可能为____ 度,(不需要解题过程)?若没有可能,说明理由___
(1)作用在 A 点的最小的力的大小为
(2)有小虹、小杨两位同学用作图法进一步分析 FA 大小时发现,如图 (a)(b)所示, 小虹认为:当 FA 与杠杆 OA 的夹角为 90°时,lA>lB,为省力杠杆; 小杨认为:当 FA 与杠杆 OA 的夹角为 20°时,lA<lB,为费力杠杆;
①请判断:就他们设想的角度而言,小虹的结论是
②请你根据所学的数学知识猜想,是否有可能存在 FA 与杠杆 OA 的夹角为θ时,该杠杆为等 臂杠杆?若有,则θ角可能为
您最近一年使用:0次
综合题
|
适中
(0.65)
解题方法
【推荐1】西安地铁五号线于 2020年12月28日上午9 点30分正式投入载客服务,地铁5号线贯穿主城区并连接西咸新区,沿线分布着多所高等院校、科研机构,同时分布小雁塔、唐长安城遗址、青龙寺等,横贯西咸新区沣东新城、沣西新城,线路以高架为主, 连接交大创新港、西工大翱翔小镇和欢乐谷等一批重大项目。地铁5号线全长约为45千米,西起创新港,东至西安东站,共设车站34座,单程行车时间约为75分钟,列车长度约为 120m。求:
(1)乘客看到窗外的美景疾驰而过,美景相对于列车是___________ 的;(选填“静止”或“运动”)
(2)若不计车长,列车单程的平均速度约为多少km/h,合多少m/s;( )
(3)若列车以(2)中的速度做匀速直线运动,则列车完全通过长度约为1.32千米石桥立交的时间。( )
(1)乘客看到窗外的美景疾驰而过,美景相对于列车是
(2)若不计车长,列车单程的平均速度约为多少km/h,合多少m/s;
(3)若列车以(2)中的速度做匀速直线运动,则列车完全通过长度约为1.32千米石桥立交的时间。

您最近一年使用:0次
综合题
|
适中
(0.65)
解题方法
【推荐2】大家对“龟兔赛跑”的寓言故事耳熟能详。开始兔子跑得很快。可它回头一看,乌龟才爬了一小段路,于是兔子就在树下呼呼大睡起来了,如图。乌龟不停地往前爬、超过了睡着的兔子……他继续不停向前爬,终于到了终点。当兔子醒来时乌龟已经到了终点。__________ (选“向前”或“向后”)的;
(2)乌龟爬行的平均速度约为0.05m/s,现乌龟与兔子进行赛跑比赛,乌龟完成比赛共用时100分钟,则比赛的起点距离终点小山头约多少米?
(3)兔子奔跑的平均速度约为6m/s,兔子为了不输给乌龟,比赛期间睡觉时间最多可以是多少秒?

(2)乌龟爬行的平均速度约为0.05m/s,现乌龟与兔子进行赛跑比赛,乌龟完成比赛共用时100分钟,则比赛的起点距离终点小山头约多少米?
(3)兔子奔跑的平均速度约为6m/s,兔子为了不输给乌龟,比赛期间睡觉时间最多可以是多少秒?
您最近一年使用:0次


