杆秤是我国最古老也是现今人们仍然在使用的称量工具,是根据杠杆原理制造出来的以方便人们进行买卖,映射出我国古代劳动人民的聪明才智,具有悠久的历史文化。在物理实践活动中,小明探究杠杆的平衡条件之后,制作了一把杆秤;
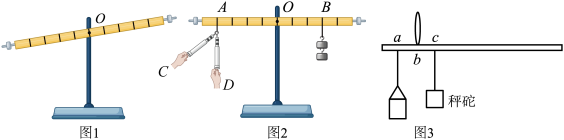
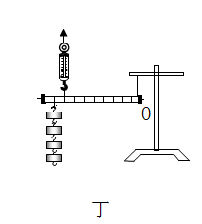
(1)将杠杆的中点悬挂,杠杆在图1所示的位置静止,此时杠杆___________ (选填“平衡”或“不平衡”)。为使杠杆在水平位置平衡,小明应将杠杆的平衡螺母向___________ (选填“左”或“右”)调节,这样做的目的是便于直接在杠杆上读出___________ ;
(2)调节杠杆水平平衡后,在杠杆两侧悬挂不同数量的钩码并移动钩码的位置,使杠杆重新水平平衡,测得的实验数据如下表;
①请将表格横线处的内容补充完整:___________ ;
②小明多次实验的目的是___________ ;
(3)如图2,小明在杠杆A位置挂一个弹簧测力计,在B位置挂了2个钩码,现将弹簧测力计从D位置旋转到C位置,此过程中杠杆始终在水平位置保持平衡,则弹簧测力计的示数___________ (选填“变大”、“变小”或“不变”);
(4)实验结束后,小明制作了如图3所示的杆秤,经测试发现能测的物体的最大质量太小。下列操作能使杆秤所测最大质量变大的是___________ (选填序号)。
A.将a点向左移 B.将b点向左移
C.将a、b两点都向右移动等长距离 D.换一个质量较小的秤砣
(1)将杠杆的中点悬挂,杠杆在图1所示的位置静止,此时杠杆
(2)调节杠杆水平平衡后,在杠杆两侧悬挂不同数量的钩码并移动钩码的位置,使杠杆重新水平平衡,测得的实验数据如下表;
实验次数动力 |
| 动力臂 |
| 阻力臂 |
1 | 1 | 10 | 2 | 5 |
2 | 2 | 10 | 1 | 20 |
3 | 2 | 3 | 10 |

 阻力
阻力

②小明多次实验的目的是
(3)如图2,小明在杠杆A位置挂一个弹簧测力计,在B位置挂了2个钩码,现将弹簧测力计从D位置旋转到C位置,此过程中杠杆始终在水平位置保持平衡,则弹簧测力计的示数
(4)实验结束后,小明制作了如图3所示的杆秤,经测试发现能测的物体的最大质量太小。下列操作能使杆秤所测最大质量变大的是
A.将a点向左移 B.将b点向左移
C.将a、b两点都向右移动等长距离 D.换一个质量较小的秤砣
更新时间:2023-11-14 21:13:09
|
相似题推荐
实验题
|
较难
(0.4)
解题方法
【推荐1】根据各图,完成填空:
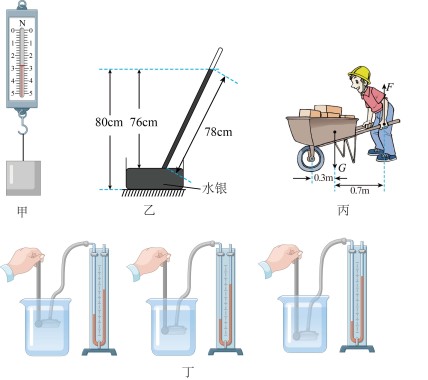
图甲:木块重力_______ N。
图乙:大气压强为______ cm水银柱。
图丙:独轮车车箱和砖头的总重力G为1000N,工人推车如图所示,则动力臂为______ m,人手竖直向上的力F应为______ N。
图丁:在探究“影响液体内部压强大小因素”中,需要观察液体压强计探头所在的位置和压强计_______ 。A、B、C中装的是水,由图可知_______ (选填A、B或C)中探头受到液体的压强最大,说明液体压强随深度的增加而_______ 。
图甲:木块重力
图乙:大气压强为
图丙:独轮车车箱和砖头的总重力G为1000N,工人推车如图所示,则动力臂为
图丁:在探究“影响液体内部压强大小因素”中,需要观察液体压强计探头所在的位置和压强计
您最近一年使用:0次
实验题
|
较难
(0.4)
解题方法
【推荐2】同学们利用轻质杠杆探究杠杆的平衡条件。

(1)杠杆静止时如图甲所示,可将平衡螺母向左调节使其水平,这样做可以消除杠杆
(2)用弹簧测力计代替钩码,如图丙所示,不断改变弹簧测力计的作用点和力的大小,使杠杆总在水平位置平衡,弹簧测力计的拉力F与其力臂l₁的图像如图丁所示,图像中每个点与两坐标轴围成的矩形面积
(3)小马利用该杠杆改装成了一个杠杆液体密度计,该装置可测量小桶内液体的密度,如图戊所示,将容积为20mL的小桶挂在M点,调节平衡螺母使杠杆水平平衡,已知OM=OA=6cm,则杠杆密度计的“0刻度”线应在 。
。
您最近一年使用:0次
实验题
|
较难
(0.4)
名校
解题方法
【推荐3】利用杠杆做以下实验,实验时使用的每个钩码的质量均相等,杠杆上相邻刻度线间的距离相等。
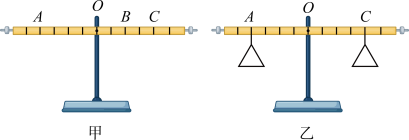
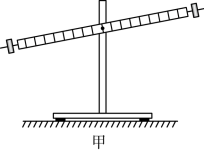
(1) 如图甲所示,将杠杆中点置于支架上,当杠杆静止时,发现杠杆的右端下沉,若想使杠杆在水平位置平衡,应将杠杆的平衡螺母向___________ 调节,使杠杆在水平位置平衡。杠杆平衡后, A点悬挂 3个钩码,要使杠杆在水平位置再次平衡,需在 B点悬挂___________ 个钩码。之后在A、B 两点再各增加 1个钩码,杠杆将___________ (选填“顺时针旋转”或者“逆时针旋转”),为了使杠杆再次在水平位置平衡,可以在B点再添加___________ 个钩码;
(2) 通过多次实验,分析数据,得到杠杆的平衡的条件是___________ ;
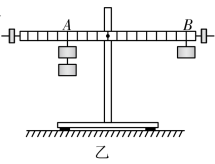
(3) 如图乙所示,在 A、C两点分别悬挂等重的载物盘,制作了一个天平。左盘盛放物体、右盘加减砝码、此天平是利用了___________ (选填“省力”或“费力”或“等臂”)杠杆原理制成的;
(4) 小明正确使用自制天平称量物体质量时:
① 假如支点O因某种原因向右偏移,则测量值___________ 真实值(选填“大于”“等于”或“小于”);
②假如砝码因生锈等原因质量增大,则测量值___________ 真实值(选填“大于”“等于”或“小于”);
(5)探究完成后,小明同学制作了如图丙所示的杆秤,使用时将货物挂在秤钩上,用手提起B或C处的秤纽,移动秤砣在秤杆上的位置,当秤杆水平平衡时,可读出货物的质量。秤砣最远可移至D点,此秤最大称量是10kg。秤杆、秤钩和秤纽的质量忽略不计,AB、BC、BD的长度如图丙所示。下列说法正确的是( ) 。

A.秤砣的质量是0.5kg
B.越靠近提纽处刻度值越大
C.距离C点12.5cm,有两个刻度,分别为1kg和3.1kg
D.在测量范围内,该杆秤称量任意质量物体并保持平衡,手对提纽的拉力不变
(1) 如图甲所示,将杠杆中点置于支架上,当杠杆静止时,发现杠杆的右端下沉,若想使杠杆在水平位置平衡,应将杠杆的平衡螺母向
(2) 通过多次实验,分析数据,得到杠杆的平衡的条件是
(3) 如图乙所示,在 A、C两点分别悬挂等重的载物盘,制作了一个天平。左盘盛放物体、右盘加减砝码、此天平是利用了
(4) 小明正确使用自制天平称量物体质量时:
① 假如支点O因某种原因向右偏移,则测量值
②假如砝码因生锈等原因质量增大,则测量值
(5)探究完成后,小明同学制作了如图丙所示的杆秤,使用时将货物挂在秤钩上,用手提起B或C处的秤纽,移动秤砣在秤杆上的位置,当秤杆水平平衡时,可读出货物的质量。秤砣最远可移至D点,此秤最大称量是10kg。秤杆、秤钩和秤纽的质量忽略不计,AB、BC、BD的长度如图丙所示。下列说法正确的是
A.秤砣的质量是0.5kg
B.越靠近提纽处刻度值越大
C.距离C点12.5cm,有两个刻度,分别为1kg和3.1kg
D.在测量范围内,该杆秤称量任意质量物体并保持平衡,手对提纽的拉力不变
您最近一年使用:0次
实验题
|
较难
(0.4)
名校
解题方法
【推荐1】在复习物理实验时,王老师带来了一个自制杠杆AB,从其上找一点C用支架支起来,如图甲所示,当依次在杠杆上的B1、B2、B等各点施加一个向下的力时,发现越来越容易提起水桶。根据这一实验现象同学们提出了下面的探究问题:阻力和阻力臂不变,杠杆平衡时,动力和动力臂之间存在着怎样的关系?为探究这个问题,同学们找来下列器材:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
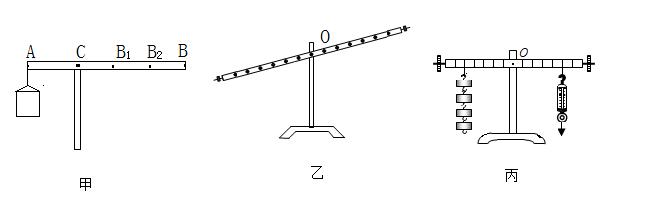
(1)实验前,小红的杠杆如图乙所示,为使杠杆在水平位置平衡,应将杠杆左端的平衡螺母向______ 边调(选填“左”或“右”);
(2)如图丙所示,小红在实验过程中,保持阻力、阻力臂不变,在支点O右侧不同位置,用弹簧测力计施加竖直向下的拉力(动力),使杠杆在水平位置平衡,测出每一组动力臂和对应的动力,并记录在表中。
①实验中,保持杠杆在水平位置平衡,这样做的好处是便于在杠杆上直接读取______ ;
②分析表中数据,同学们得出结论:阻力和阻力臂不变,杠杆平衡时______ ;
③实验中小红发现,为了保持杠杆在水平位置平衡,当弹簧测力计的拉力方向偏离竖直方向时,弹簧测力计的拉力会变大,原因是______ ;
(4)小华使用相同规格的器材按图丁所示探究同一问题,也测出每一组动力臂和对应的动力,并记录在下表中:
对照实验数据小华发现:他测得的动力都比小红测得的数据大。小华确定自己从实验操作到读数都没有问题,导致小华测得实验数据偏大的原因可能是:______ 。
(1)实验前,小红的杠杆如图乙所示,为使杠杆在水平位置平衡,应将杠杆左端的平衡螺母向
(2)如图丙所示,小红在实验过程中,保持阻力、阻力臂不变,在支点O右侧不同位置,用弹簧测力计施加竖直向下的拉力(动力),使杠杆在水平位置平衡,测出每一组动力臂和对应的动力,并记录在表中。
| 实验次数 | 阻力F2/N | 阻力臂l2/cm | 动力F1/N | 动力臂l1/cm |
| 1 | 2 | 10 | 1.0 | 20 |
| 2 | 2 | 10 | 2.0 | 10 |
| 3 | 2 | 10 | 4.0 | 5 |
①实验中,保持杠杆在水平位置平衡,这样做的好处是便于在杠杆上直接读取
②分析表中数据,同学们得出结论:阻力和阻力臂不变,杠杆平衡时
③实验中小红发现,为了保持杠杆在水平位置平衡,当弹簧测力计的拉力方向偏离竖直方向时,弹簧测力计的拉力会变大,原因是
(4)小华使用相同规格的器材按图丁所示探究同一问题,也测出每一组动力臂和对应的动力,并记录在下表中:
| 实验次数 | 阻力F2/N | 阻力臂l2/cm | 动力F1/N | 动力臂l1/cm |
| 1 | 2 | 10 | 2.5 | 20 |
| 2 | 2 | 10 | 5.0 | 10 |
| 3 | 2 | 10 | 10.0 | 5 |
对照实验数据小华发现:他测得的动力都比小红测得的数据大。小华确定自己从实验操作到读数都没有问题,导致小华测得实验数据偏大的原因可能是:
您最近一年使用:0次
实验题
|
较难
(0.4)
【推荐2】在探究“杠杆的平衡条件”实验中,所用的实验器材有:杠杆(杠杆上每小格长为2cm)、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个(每个钩码重lN)。
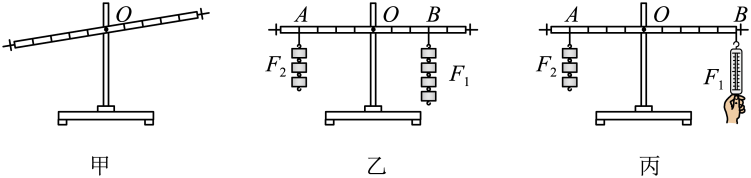
(1)实验前,杠杆静止在如图甲所示的位置,此时杠杆处于______ (选填“平衡”或“不平衡”)状态;
(2)实验时,使杠杆在______ 位置平衡,主要是为了便于测量______ 大小,因此他把杠杆右端的平衡螺母调到最右边,但是杠杆仍然不能水平平衡,接下来他应该______ ;
(3)杠杆在水平位置平衡后,小明在杠杆A点处挂上2个钩码,作为动力F1,B点处挂上1个钩码,作为阻力F2,杠杆恰好在水平位置平衡,如图乙所示,分别测量出两个力的力臂l1和l2,计算后发现:F1l1=F2l2,便得出杠杆的平衡条件是:F1l1=F2l2。但小红认为小明这种实验处理方法是不完善的,理由是______ ;
(4)接着,小明提出新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小明利用如图丙所示装置进行探究,在杠杆D点处挂上2个钩码,用弹簧测力计在C点处竖直向上拉,使杠杆在水平位置处于平衡状态,此时弹簧测力计的示数如图丙所示,则弹簧测力计的拉力是______ N.以弹簧测力计的拉力为动力F1,钩码重力为阻力F2,多次调整力和力臂的大小进行测量,发现:F1l1总是大于F2 l 2,其原因主要是受______ 的影响;

(5)小明又把弹簧测力计的作用点固定,只改变测力计与水平方向的角度θ,则能描述测力计示数F与θ关系的图象是______ 。
A.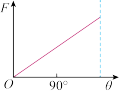 B.
B.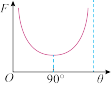 C.
C. D.
D.
(1)实验前,杠杆静止在如图甲所示的位置,此时杠杆处于
(2)实验时,使杠杆在
(3)杠杆在水平位置平衡后,小明在杠杆A点处挂上2个钩码,作为动力F1,B点处挂上1个钩码,作为阻力F2,杠杆恰好在水平位置平衡,如图乙所示,分别测量出两个力的力臂l1和l2,计算后发现:F1l1=F2l2,便得出杠杆的平衡条件是:F1l1=F2l2。但小红认为小明这种实验处理方法是不完善的,理由是
(4)接着,小明提出新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小明利用如图丙所示装置进行探究,在杠杆D点处挂上2个钩码,用弹簧测力计在C点处竖直向上拉,使杠杆在水平位置处于平衡状态,此时弹簧测力计的示数如图丙所示,则弹簧测力计的拉力是
(5)小明又把弹簧测力计的作用点固定,只改变测力计与水平方向的角度θ,则能描述测力计示数F与θ关系的图象是
A.
B.C.D.
您最近一年使用:0次
实验题
|
较难
(0.4)
解题方法
【推荐3】在“探究杠杆的平衡条件”实验中
(1)在做实验前,杠杆静止在如图甲所示的位置,此时杠杆_____ (选填“平衡”或“不平衡”)。下一步的操作应该将图甲右边的平衡螺母向 _____ (选填“左”或“右”)调节,使杠杆在水平位置平衡,这样做是为了在实验中 _____ 。
(2)保持图丙中左边钩码的个数和位置不变,在右端用弹簧测力计竖直向下拉杠杆。弹簧测力计从B点向支点O移动过程中(未到O点),杠杆始终保持水平平衡,大致可以反映拉力F的大小随它的力臂l变化的关系的是:_____ 。
A.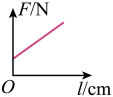 B.
B.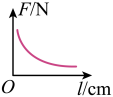 C.
C. D.
D.
(3)如丙图所示,当杠杆在水平位置平衡时,弹簧测力计的示数为F1,将弹簧测力计斜向左拉,杠杆在水平位时平衡时,其示数F'1_____ F1(选项“>”、“=”或“<”)。
(4)另一小组的小红在实验中将弹簧测力计的拉环挂在杠杆右端,用力向下拉挂钩,读出弹簧测力计的示数。进行多次实验发现都不能满足杠杆平衡条件,原因是_____ 。
(5)如图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在下表中。
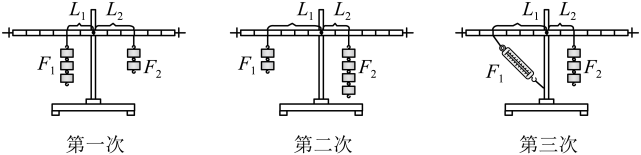
请将表格中的实验数据补充完整,A:_____ ,B:_____ 。
(6)小明的第3次实验存在错误,其错误是_____ 。
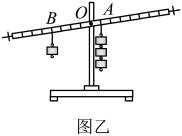
(7)小红调节杠杆平衡后,在杠杆的两端挂上钩码,杠杆的状态如图乙所示,为此,小红又调节两端的平衡螺母,使杠杆重新回到水平平衡位置.然后正确记录下钩码重,动力臂OA和阻力臂OB的值。分析实验致据后发现得不到教材中的“杠杆的平衡条件”小红的哪一步操作导致了实验结果与教材中的结论不一样?答:_____
(1)在做实验前,杠杆静止在如图甲所示的位置,此时杠杆
(2)保持图丙中左边钩码的个数和位置不变,在右端用弹簧测力计竖直向下拉杠杆。弹簧测力计从B点向支点O移动过程中(未到O点),杠杆始终保持水平平衡,大致可以反映拉力F的大小随它的力臂l变化的关系的是:
A.
B. C. D.(3)如丙图所示,当杠杆在水平位置平衡时,弹簧测力计的示数为F1,将弹簧测力计斜向左拉,杠杆在水平位时平衡时,其示数F'1
(4)另一小组的小红在实验中将弹簧测力计的拉环挂在杠杆右端,用力向下拉挂钩,读出弹簧测力计的示数。进行多次实验发现都不能满足杠杆平衡条件,原因是
(5)如图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在下表中。
实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
1 | 1.5 | 10 | 1 | A |
2 | 1 | 20 | B | 10 |
3 | 1 | 20 | 1.5 | 10 |
(6)小明的第3次实验存在错误,其错误是
(7)小红调节杠杆平衡后,在杠杆的两端挂上钩码,杠杆的状态如图乙所示,为此,小红又调节两端的平衡螺母,使杠杆重新回到水平平衡位置.然后正确记录下钩码重,动力臂OA和阻力臂OB的值。分析实验致据后发现得不到教材中的“杠杆的平衡条件”小红的哪一步操作导致了实验结果与教材中的结论不一样?答:
您最近一年使用:0次
实验题
|
较难
(0.4)
解题方法
【推荐1】学校课外物理实践小组利用家中常见的物品筷子、刻度尺、杯子和水巧妙地测量小石块的密度,实验过程如下:

(1)如图甲所示,用细绳将筷子悬挂,筷子静止处于___________ (选填“平衡”或“不平衡”)状态;
(2)要使筷子在水平位置平衡,应将悬挂点向___________ 调节(选填“左”或“右”),直至筷子在水平位置平衡,标记支点的位置为O。如图乙所示重物悬挂在筷子A处,移动石块悬挂在筷子B处,此时筷子在水平位置恢复平衡,用刻度尺分别测得OA、OB的长度为7cm和5cm;
(3)上述实验过程,第一次调节水平平衡是___________ ,第二次调节水平平衡是___________ (选填序号“A”或“B”)。
A.消除筷子自重的影响
B.便于测量力臂
(4)保持重物的悬挂点位置A不变,将小石块浸没在盛有适量水的杯中,目的是保证排开水的体积___________ (选填“大于”、“等于”或“小于”)石块的体积;如图丙所示,调整小石块的悬挂点位置(且未与杯底、杯壁接触),直至筷子在水平位置再次平衡,用刻度尺测得OC的长度为8cm;
(5)已知水的密度是1g/cm3,则测得石块的密度为___________ g/cm3(结果保留两位有效数字)。
(1)如图甲所示,用细绳将筷子悬挂,筷子静止处于
(2)要使筷子在水平位置平衡,应将悬挂点向
(3)上述实验过程,第一次调节水平平衡是
A.消除筷子自重的影响
B.便于测量力臂
(4)保持重物的悬挂点位置A不变,将小石块浸没在盛有适量水的杯中,目的是保证排开水的体积
(5)已知水的密度是1g/cm3,则测得石块的密度为
您最近一年使用:0次
实验题
|
较难
(0.4)
解题方法
【推荐2】如图所示,这是“探究杠杆的平衡条件”的实验装置,每个钩码重为0.5N(钩码个数若干)。

(1)将该装置置于水平桌面上,静止时处于如图1所示,此时杠杆处于______ (选填“平衡”或“非平衡”)状态。为使杠杆在水平位置平衡,应将平衡螺母向______ (选填“左”或“右”)移;
(2)如图2所示,杠杆上的刻度均匀,在A点挂4个钩码,要使杠杆在水平位置平衡,应在B点挂_________ 个相同的钩码;当杠杆平衡后,将A、B两点下方所挂的钩码同时朝远离支点O的方向各移动一小格,则杠杆______ (选填“左端下沉”、“右端下沉”或“保持水平平衡”);
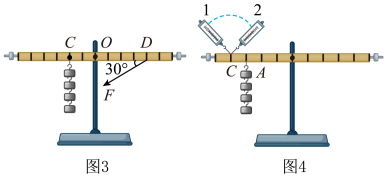
(3)如图3中杠杆每个小格长度均为5cm,在C点竖直悬挂4个钩码,当在D点用如图3所示动力F拉杠杆。此时杠杆的类型与______ (选填“筷子”、“老虎钳”或“托盘天平”)相同;
(4)如图4所示,用弹簧测力计拉杠杆的C点,当弹簧测力计由位置1转至位置2的过程中,杠杆在水平位置始终保持平衡,测力计示数变化情况是______ (选填“变小”、“变大”、“先变小后变大”、“先变大后变小”或“不变”);
(5)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”。这个结论与杠杆平衡条件不符合,原因是实验过程中______ (填字母)。
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
(1)将该装置置于水平桌面上,静止时处于如图1所示,此时杠杆处于
(2)如图2所示,杠杆上的刻度均匀,在A点挂4个钩码,要使杠杆在水平位置平衡,应在B点挂
(3)如图3中杠杆每个小格长度均为5cm,在C点竖直悬挂4个钩码,当在D点用如图3所示动力F拉杠杆。此时杠杆的类型与
(4)如图4所示,用弹簧测力计拉杠杆的C点,当弹簧测力计由位置1转至位置2的过程中,杠杆在水平位置始终保持平衡,测力计示数变化情况是
(5)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”。这个结论与杠杆平衡条件不符合,原因是实验过程中
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
您最近一年使用:0次
实验题
|
较难
(0.4)
【推荐3】物理兴趣小组的同学根据杠杆的平衡条件测出了一个物块的密度,已知每个钩码质量为100g。( ,
, )
)________ (选填“左”或“右”)调节;
(2)调节杠杆水平平衡后,用细线将物块挂于杠杆左侧,将3个钩码挂于右侧某一处时,杠杆仍处于水平平衡,如图乙所示,则物块质量为_______ g;
(3)将该物块浸没在装有水的烧杯中,调节右侧钩码的位置,使杠杆处于水平平衡,如图丙所示,此时细线的拉力大小为________ N,则物块在水中所受浮力为__________ N;
(4)物块的密度是__________ kg/m3;
【拓展】小华同学经过研究发现,如果物体悬挂位置不变,右端所挂钩码个数不变,则只需知道两次悬挂钩码的位置,经过计算就可以得出被测物体的密度。已知物体未浸没在水中时,钩码距O点的距离为 ,物体浸没在水中时,钩码距O点的距离为
,物体浸没在水中时,钩码距O点的距离为 ,则物体的密度为
,则物体的密度为_______ 。(用、、 表示)
表示)
,)
(2)调节杠杆水平平衡后,用细线将物块挂于杠杆左侧,将3个钩码挂于右侧某一处时,杠杆仍处于水平平衡,如图乙所示,则物块质量为
(3)将该物块浸没在装有水的烧杯中,调节右侧钩码的位置,使杠杆处于水平平衡,如图丙所示,此时细线的拉力大小为
(4)物块的密度是
【拓展】小华同学经过研究发现,如果物体悬挂位置不变,右端所挂钩码个数不变,则只需知道两次悬挂钩码的位置,经过计算就可以得出被测物体的密度。已知物体未浸没在水中时,钩码距O点的距离为
,物体浸没在水中时,钩码距O点的距离为,则物体的密度为、、表示)
您最近一年使用:0次


