5G智能机器人
中国移动将5G智能机器人(如图甲所示),运用到校园环境监测中,进行红外智能测温以及校园消毒。智能机器人配备了5台高清摄像头和红外热成像测温仪,能够在5m范围内同时扫描多达10人的体温,如果检测到体温异常或者未带口罩,机器人会向相关人员自动发送警报。机器人当剩余电量减为电池容量的20%时,会主动寻找充电器充电。下表为某智能机器人的部分参数。
机器人上还安装了超声波雾化器自动喷枪,工作时,雾化片产生每秒170万次的高频率振动,将消毒液雾化成大量1μm~5μm的超微粒子,再吹散到空气中进行消杀病毒。其中额定雾化量是指雾化器正常工作1h雾化液体的体积。
| 额定工作电压 | 18V | 额定行进功率 | 200W |
| 电池容量 | 30Ah | 额定喷洒功率 | 100W |
| 水箱容积 | 20L | 行进速度 | 0.3~0.6m/s |
| 额定雾化量 | 15L/h | 净重 | 102kg |

(1)下列说法不正确的是
A.高清摄像头是通过凸透镜成正立缩小的实像
B.红外测温仪工作时发出红外线射向人体再反射回测温仪内进行测温
C.机器人安装宽履带代替车轮,既为了增大摩擦,又为了减小压强
D.通过遥控器发出超声波来远程控制机器人的前进和后退
(2)若机器人的履带与地面的接触面面积是300cm2,在装满密度为0.9×103kg/m3的消毒液时,对水平地面的压强为
(3)该机器人仅执行消杀任务,以正常工作状态行进,充满电后最多可连续工作
(4)机器人除尘装置的简化电路由电磁继电器、光源、挡板、光敏电阻R、额定电压为220V的除尘电动机M、低压电源、高压电源组成。空气中尘埃量较少时,光源发出来的光被挡板挡住。当空气中尘埃量达到一定值时,由于尘埃的反射,部分光越过挡板射到光敏电阻上,其电阻值减小,通过电磁继电器的电流增大,衔铁吸下,除尘电动机工作。请用笔画线代替导线连接电路图;

(5)小明设计了如图乙的模拟智能测温报警电路:电源电压调为18V,报警器(电阻不计)通过的电流超过10mA时就会报警,电阻箱最大阻值为999Ω,热敏电阻RT其阻值随温度T的变化关系如图丙所示。
①要求:当所测温度达到成超过37℃时,系统报警,按照下列步骤试电路:
a.电路接通前,应先将滑动变阻器滑片置于b端,再将电阻箱调到
b.将开关S向c端闭合,移动滑动变阻器的滑片,直至
c.保持滑动变阻器滑片位置不变,将开关S向另一端闭合,报警系统即可正常使用。
②用①中已调试好的报警电路进行测温,测得某学生的体温为36.5℃,此时该电路中的电流是
更新时间:2022-04-16 23:26:44
|
相似题推荐
综合题
|
困难
(0.15)
真题
解题方法
【推荐1】如图所示为某学校厕所内自动冲水装置简化的原理图,这种装置能定时为便池冲水。注水口通过阀门控制可保持细小水流不停地向水箱内注水。活塞下方有支撑销(体积不计)支撑,随着水位的升高,当活塞被顶起时水由冲水口快速流出,当两侧液面相平时,活塞落下,冲水结束;杠杆AB处在水平位置,O为支点,OA:OB=1:2,A端通过竖直顶杆AC与活塞相连,连接配重M的细绳通过定滑轮竖直作用在B端。已知活塞的横截面积S1=10cm2,右侧蓄水箱的横截面积为S2=0.12m2,注水速度为20cm3/s,配重M的质量m=0.5kg,密度 物=2.0×103kg/m3,不计杆AB、顶杆AC、绳及活塞的重力,不计摩擦,不考虑冲水所用的时间,水=1.0×103kg/m3,g=10N/kg,设活塞刚被顶起时,杠杆水平,两侧水面高度差为h,求:
物=2.0×103kg/m3,不计杆AB、顶杆AC、绳及活塞的重力,不计摩擦,不考虑冲水所用的时间,水=1.0×103kg/m3,g=10N/kg,设活塞刚被顶起时,杠杆水平,两侧水面高度差为h,求:
(1)配重M所受浮力F浮;
(2)两侧水面高度差h;
(3)前后两次冲水的时间间隔;
(4)若将配重M更换成相同材料体积较小的物体,装置的其它部分不变,则前后两次冲水的时间间隔怎样变化?此方法能否起到节水的作用?

物=2.0×103kg/m3,不计杆AB、顶杆AC、绳及活塞的重力,不计摩擦,不考虑冲水所用的时间,水=1.0×103kg/m3,g=10N/kg,设活塞刚被顶起时,杠杆水平,两侧水面高度差为h,求:(1)配重M所受浮力F浮;
(2)两侧水面高度差h;
(3)前后两次冲水的时间间隔;
(4)若将配重M更换成相同材料体积较小的物体,装置的其它部分不变,则前后两次冲水的时间间隔怎样变化?此方法能否起到节水的作用?
您最近一年使用:0次
综合题
|
困难
(0.15)
名校
解题方法
【推荐2】建在地面的房屋往往会面临地基沉降问题,意大利的比萨斜塔就是因为地基沉降不均匀而倾斜的。房屋下方的地层通常包括土层和岩石层,岩石风化、脱落形成的细小颗粒称为土粒,土粒很坚硬,很难被压缩。但土粒之间有很多孔隙。如图a所示,土由土粒和土粒间的孔隙构成,土中孔隙的总体积和土粒的总体积之比称为土的孔隙比,与坚固的岩石层不同,外加压力时,土粒会发生移动。重新排列、靠紧,土的体积就变小了,如图b所示,房屋对下方地层的压力很大。土层被压缩,就造成了房屋的地基沉降,因此在建造房屋之前要勘测地层,预估地基的沉降量。
(1)从土的构成看,土被压缩的体积可以认为等于______ 减小的体积;
(2)在一次建造房屋前的地层勘测中,从上层中取一些土作为样本,烘干后测得密度为 ,已知土粒的密度为
,已知土粒的密度为 ,则土的孔隙比为多少?
,则土的孔隙比为多少?____
(3)对上述样本土进行压缩试验,得到孔隙比和所加压强的数据如表所示,请在坐标图中画出 关系图像;
关系图像;____
(4)若该房屋的重力为 ,地基面积为
,地基面积为 ,下方土层厚度为6m。请根据以上数据,预估地基的沉降量为
,下方土层厚度为6m。请根据以上数据,预估地基的沉降量为______ m。
(1)从土的构成看,土被压缩的体积可以认为等于
(2)在一次建造房屋前的地层勘测中,从上层中取一些土作为样本,烘干后测得密度为
,已知土粒的密度为,则土的孔隙比为多少?(3)对上述样本土进行压缩试验,得到孔隙比和所加压强的数据如表所示,请在坐标图中画出
关系图像;压强 | 1 | 2 | 3 | 4 |
| 孔隙比e | 0.45 | 0.42 | 0.40 | 0.39 |
,地基面积为,下方土层厚度为6m。请根据以上数据,预估地基的沉降量为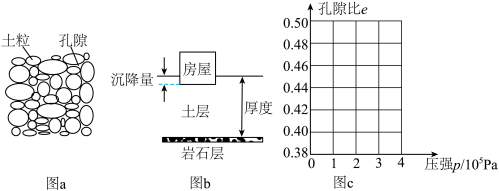
您最近一年使用:0次
综合题
|
困难
(0.15)
名校
解题方法
【推荐1】阅读短文,回答问题
无人机有竖直方向的三档风力和水平方向的两档风力,其中竖直方向的升力与风叶转速的平方成正比,对应关系如表二。产生的升力与风叶转速之比叫做动率,升力与每秒钟通过风叶空气重力之比为转力效率。
表二
(1)无人航拍机在空中悬停、飞行、降落、航拍、降落过程中,下列说法中正确的是____________ ;
A.利用超声波对无人机进行遥控的
B.无人机风叶材料很多采用碳纤维,是因为碳纤维的密度较大
C.工作时发出的声音不会对人的听力造成损伤
D.无人机匀速直线飞行时,机械能一定不变。
(2)起飞时,增大风叶的转速,使吹向下方的风量增加,增大了无人机向上的升力,当风叶转速为1.2×103r/min时,获得的向上的升力为____________ N;
(3)该无人机正常工作时的电流为____________ A;充满电后至下一次自动充电,能够提供无人机工作的机械能为____________ J;
(4)由表二数据可知,当转速为1.4×103r/min时,无人机的动率为____________ N·min/103r。上述转速下,若风叶的转圈时扫过的面积为0.28m2,空气被吹动的速度为3m/s,则1min内通过风叶的空气总质量为____________ kg,转力效率为____________ %;(p空气=1.3kg/m3)
(5)光敏电阻是制作感光器材的常用元件,其阻值随受光强度的增加而减少。在无人机的航拍镜头中,加入光敏电阻电路可自动控制进入镜头的光强度,电子镜头的透光能力随着受控电压的增加而增加,如图乙所示,RG为光敏电阻,R0为定值电阻,无人机的航拍镜头中将电子镜头电路与____________ (光敏/定值)电阻相并联。
无人航拍机
无人驾驶飞机简称“无人机”是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。如图甲所示是目前较为流行的某型号无人航拍机,当剩余电量减为电池容量的10%时,无人航拍机会自动下降并停留地面等待充电。表一为某型号无人航拍机的部分参数,其中的电池容量是指放电电流与放电总时间的乘积。
额定电压/V | 6 | 额定功率/W | 42 |
电池容量/mAh | 1500 | 工作噪音/dB | <50 |
遥控距离/m | 200 | 整机质量/g | 500 |
充电时间/min | 200 | 电机转化效率/% | 90 |
表二
风叶转速/(103r/min) | 1 | 1.2 | 1.4 |
升力/N | 4 | ||
动率/(N·min/103r) | 4 |
A.利用超声波对无人机进行遥控的
B.无人机风叶材料很多采用碳纤维,是因为碳纤维的密度较大
C.工作时发出的声音不会对人的听力造成损伤
D.无人机匀速直线飞行时,机械能一定不变。
(2)起飞时,增大风叶的转速,使吹向下方的风量增加,增大了无人机向上的升力,当风叶转速为1.2×103r/min时,获得的向上的升力为
(3)该无人机正常工作时的电流为
(4)由表二数据可知,当转速为1.4×103r/min时,无人机的动率为
(5)光敏电阻是制作感光器材的常用元件,其阻值随受光强度的增加而减少。在无人机的航拍镜头中,加入光敏电阻电路可自动控制进入镜头的光强度,电子镜头的透光能力随着受控电压的增加而增加,如图乙所示,RG为光敏电阻,R0为定值电阻,无人机的航拍镜头中将电子镜头电路与
您最近一年使用:0次
综合题
|
困难
(0.15)
解题方法
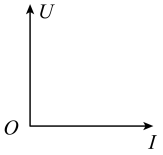
【推荐2】电源实际上是有电阻的,可以等效为一个理想电源U和一个定值电阻r串联。如图,用电源电压为U0、电阻r为R0的电源,向定值电阻R供电。若将AB间改接其它阻值的电阻,定值电阻两端的电压U与电路中的电流 I也会随之变化。


(1)请你在下图作出AB之间的阻值变化过程中U-I图像的示意图( ) ,并说明U-I图像与两坐标轴交点的值及其物理意义 ______ ;
(2)小明又作出了AB之间电阻消耗的电功率P随电流I变化的图像如图所示,他由图像看出,除了P的最大值以外,同一个电功率值P可对应两个不同的电流I1、I2,即可对应两个不同的定值电阻R1、 R2,请你帮助小明推导计算出R0、R1、R2这三个物理量间的关系式是______ 。

(1)请你在下图作出AB之间的阻值变化过程中U-I图像的示意图
(2)小明又作出了AB之间电阻消耗的电功率P随电流I变化的图像如图所示,他由图像看出,除了P的最大值以外,同一个电功率值P可对应两个不同的电流I1、I2,即可对应两个不同的定值电阻R1、 R2,请你帮助小明推导计算出R0、R1、R2这三个物理量间的关系式是
您最近一年使用:0次
综合题
|
困难
(0.15)
解题方法
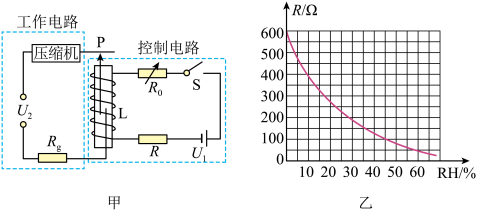
【推荐3】某自动除湿机可以实现恒湿功能,当湿度达到设定值时,会自动断开压缩机。除湿机中的压缩机是整个系统的核心,除湿机的动力全部由压缩机来提供。除湿机内部的电路结构由控制电路和工作电路两部分组成,简化后的电路图如图甲所示。控制电路中的电源电压U1=12V,调控电阻R0的阻值范围为0~1000Ω,R为装在除湿机内的湿敏电阻,其阻值随相对湿度RH变化的图像如图乙所示,L为磁控开关。当湿敏电阻R的阻值发生变化时,控制电路中线圈的电流随之发生变化,当电流大于或等于20mA时,L的两个磁性弹片相互吸合,工作电路的压缩机开始带动系统进行除湿。工作电路两端电压220V,Rg为保护电阻,磁控开关L的线圈电阻不计。______ 极;
(2)若除湿过程中工作电路的总功率为1100W,已知保护电阻Rg=2Ω,则除湿过程中工作电路中的电流为______ A。如果除湿机工作时磁控开关L的磁性弹片有一半的时间是闭合的,1h内Rg消耗的电能为______ J;
(3)实验室内有较敏感的器件,要求相对湿度控制在45%以内,则调控电阻R0的阻值不能超过______ Ω。若要适当提高相对湿度,可采取的办法是______ (答出一种即可);
(4)某除湿机有40%(干衣模式)、50%、60%、70%等4个恒湿功能挡位,如图是它分别工作于不同挡位时测得的电流随时间的变化图象,其中属于干衣模式的是______ (填字母)。
(2)若除湿过程中工作电路的总功率为1100W,已知保护电阻Rg=2Ω,则除湿过程中工作电路中的电流为
(3)实验室内有较敏感的器件,要求相对湿度控制在45%以内,则调控电阻R0的阻值不能超过
(4)某除湿机有40%(干衣模式)、50%、60%、70%等4个恒湿功能挡位,如图是它分别工作于不同挡位时测得的电流随时间的变化图象,其中属于干衣模式的是
A.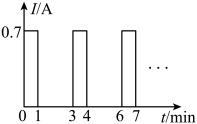
B.
C.
D.
您最近一年使用:0次


