某纯电动SUV品牌汽车应用了“高效变频电驱动技术”,在售车部广告上有“百公里耗电量仅9度”的报道,该车部分性能参数如下表:
下表是该车《驾驶守则》中的部分安全距离表格:
其中反应距离指驾驶员从发现情况到开始刹车过程中汽车匀速行驶的距离,刹车距离指从刹车到停下过程中汽车减速行驶的距离,停车距离x为反应距离与刹车距离之和,刹车距离是衡量汽车安全性能的重要参数之一。
(1)电动机工作时,其工作原理是________ ,该汽车的动力蓄电池在充满电后电池存储的电能为____ ;
(2)该车三相交流变频电机采用交流调速方式,在效率一定时,其耗电功率与转速的立方成正比,而行驶速度与电机转速成正比,则汽车所受阻力f与车速v的关系为(用文字表述)____________ ;
(3)①当汽车以最高时速70km/h匀速行驶时,其反应距离为____ m;②汽车保持恒定功率5.0kW在平直路面行驶时,其所受阻力大小为360N,则汽车匀速行驶的速度为v=____ km/h,这一速度所对应的停车距离为____ m;
(4)若小明一家三口周日乘坐此车到无锡灵山春游,全家人的总质量为170kg,汽车车轮与地面接触的总面积为0.2m2,求汽车慢速行驶过程中车轮对地面的压强________ (g=10N/kg);
(5)请你推理演算论证该车“百公里耗电量仅9度”的报道是否真实?_________
车身重量/kg | 引擎类型 | 动力蓄电池 | 电机额定功率/kW | 连续行驶里程/km | 最高速度km/h |
1330 | 电动机 | 铅酸电池72V 200Ah | 7.5 | 160 | 70 |
刹车前的车速v/(km/h) | 反应距离L(m) | 刹车距离s(m) | 停车距离x(m) |
40 | 10 | 10 | 20 |
50 | 12.5 | 15 | 27.5 |
60 | 15 | 22.5 | 37.5 |
(1)电动机工作时,其工作原理是
(2)该车三相交流变频电机采用交流调速方式,在效率一定时,其耗电功率与转速的立方成正比,而行驶速度与电机转速成正比,则汽车所受阻力f与车速v的关系为(用文字表述)
(3)①当汽车以最高时速70km/h匀速行驶时,其反应距离为
(4)若小明一家三口周日乘坐此车到无锡灵山春游,全家人的总质量为170kg,汽车车轮与地面接触的总面积为0.2m2,求汽车慢速行驶过程中车轮对地面的压强
(5)请你推理演算论证该车“百公里耗电量仅9度”的报道是否真实?
更新时间:2017-04-15 14:25:07
|
相似题推荐
综合题
|
困难
(0.15)
解题方法
【推荐1】如图甲所示,质地均匀的长方体重8N,放在水平桌面上,它与桌面的接触面积为0.02m2;
(1)它对桌面的压强为______ Pa;
(2)若将图中阴影部分切除,则剩余部分对桌面的压强将______ (选填“变小”、“变大”或“不变”);
(3)图乙是某同学在探究甲、乙两种物质质量和体积关系时得到的图象;若用这两种物质分别做成A、B两个质量相等的实心正方体,把它们平放在水平地面上,则两物体对水平地面的压强之比pA∶pB为______ 。

(1)它对桌面的压强为
(2)若将图中阴影部分切除,则剩余部分对桌面的压强将
(3)图乙是某同学在探究甲、乙两种物质质量和体积关系时得到的图象;若用这两种物质分别做成A、B两个质量相等的实心正方体,把它们平放在水平地面上,则两物体对水平地面的压强之比pA∶pB为
您最近一年使用:0次
综合题
|
困难
(0.15)
名校
解题方法
【推荐2】建在地面的房屋往往会面临地基沉降问题,意大利的比萨斜塔就是因为地基沉降不均匀而倾斜的。房屋下方的地层通常包括土层和岩石层,岩石风化、脱落形成的细小颗粒称为土粒,土粒很坚硬,很难被压缩。但土粒之间有很多孔隙。如图a所示,土由土粒和土粒间的孔隙构成,土中孔隙的总体积和土粒的总体积之比称为土的孔隙比,与坚固的岩石层不同,外加压力时,土粒会发生移动。重新排列、靠紧,土的体积就变小了,如图b所示,房屋对下方地层的压力很大。土层被压缩,就造成了房屋的地基沉降,因此在建造房屋之前要勘测地层,预估地基的沉降量。
(1)从土的构成看,土被压缩的体积可以认为等于______ 减小的体积;
(2)在一次建造房屋前的地层勘测中,从上层中取一些土作为样本,烘干后测得密度为 ,已知土粒的密度为
,已知土粒的密度为 ,则土的孔隙比为多少?
,则土的孔隙比为多少?____
(3)对上述样本土进行压缩试验,得到孔隙比和所加压强的数据如表所示,请在坐标图中画出 关系图像;
关系图像;____
(4)若该房屋的重力为 ,地基面积为
,地基面积为 ,下方土层厚度为6m。请根据以上数据,预估地基的沉降量为
,下方土层厚度为6m。请根据以上数据,预估地基的沉降量为______ m。
(1)从土的构成看,土被压缩的体积可以认为等于
(2)在一次建造房屋前的地层勘测中,从上层中取一些土作为样本,烘干后测得密度为
,已知土粒的密度为,则土的孔隙比为多少?(3)对上述样本土进行压缩试验,得到孔隙比和所加压强的数据如表所示,请在坐标图中画出
关系图像;压强 | 1 | 2 | 3 | 4 |
| 孔隙比e | 0.45 | 0.42 | 0.40 | 0.39 |
,地基面积为,下方土层厚度为6m。请根据以上数据,预估地基的沉降量为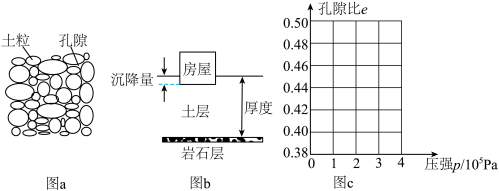
您最近一年使用:0次
综合题
|
困难
(0.15)
名校
解题方法
【推荐3】有一种测量人的体重的电子秤,其原理图如图中的虚线框所示,它主要由三部分构成:踏板和压力杠杆ABO,压力传感器R(电阻值会随所受压力大小发生变化的可变电阻),显示体重大小的仪表A(实质是电流表)。其中AB∶BO=4∶1,压力传感器表面能承受最大压强为2×106Pa,且已知压力传感器R的电阻与所受压力的关系如下表所示。
设踏板和杠杆组件的质量可以忽略不计,接通电源后,压力传感器两端的电压恒为4.8V,取g=10N/kg,请回答:
(1)利用表中数据归纳出电阻R随压力F变化的函数关系式;
(2)判断该秤表盘刻度划分是否均匀?
(3)如果某人站在该秤踏板上,电流表刻度盘的示数为20mA,这个人的体重(质量)是多少kg?
(4)若压杆与压力传感器之间的接触面积是1.5cm2,则该秤的最大称量值是多少kg?
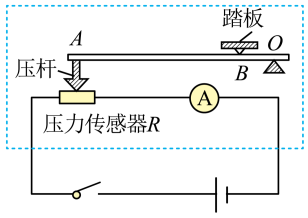
| 压力(N) | 0 | 50 | 100 | 150 | 200 | 250 | 300 | … |
电阻( ) ) | 300 | 280 | 260 | 240 | 220 | 200 | 180 | … |
设踏板和杠杆组件的质量可以忽略不计,接通电源后,压力传感器两端的电压恒为4.8V,取g=10N/kg,请回答:
(1)利用表中数据归纳出电阻R随压力F变化的函数关系式;
(2)判断该秤表盘刻度划分是否均匀?
(3)如果某人站在该秤踏板上,电流表刻度盘的示数为20mA,这个人的体重(质量)是多少kg?
(4)若压杆与压力传感器之间的接触面积是1.5cm2,则该秤的最大称量值是多少kg?
您最近一年使用:0次
综合题
|
困难
(0.15)
名校
解题方法
【推荐1】“SmartflowerPop”是一款太阳能电池板,它能确保与日照方向始终垂直,使其吸收的太阳能最多.该电池板有自动清洁装置,它的工作效率比沾满灰灰尘的电池板更高,白天,太阳能电池发出的电可直接接供给家用电器工作,多余部分存储在蓄电池中。

(1)太阳能属于______ (选填“常规”或“新”)能源,太阳能电池将光能转化为______ 能;
(2)“Smartfloser Pop”晚间自动清洁一次需要1h,此时的耗电功率为1kw,则自动清洁一次消耗的电能为多少焦______ ?与多少千克的焦炭完全燃烧产生的热量相等______ (焦炭的热值3×107J/kg);
(3)若叶片面积为25m2,白天太阳能电池接收太阳辐射的平均功率为1000W/m2,光电转化效率为20%,某日,白天家庭耗电的平均功率为4kW,电池的充电效率为84%,晚上若将当天存储的电能全部转化为内能,可将60kg的水从20 加热到68,求当天的日照时间为多少小时
加热到68,求当天的日照时间为多少小时______ ?[水的比热容为4.2×103J/(kg·)]。
(1)太阳能属于
(2)“Smartfloser Pop”晚间自动清洁一次需要1h,此时的耗电功率为1kw,则自动清洁一次消耗的电能为多少焦
(3)若叶片面积为25m2,白天太阳能电池接收太阳辐射的平均功率为1000W/m2,光电转化效率为20%,某日,白天家庭耗电的平均功率为4kW,电池的充电效率为84%,晚上若将当天存储的电能全部转化为内能,可将60kg的水从20
加热到68,求当天的日照时间为多少小时)]。
您最近一年使用:0次
综合题
|
困难
(0.15)
名校
【推荐2】某台以汽油为燃料的汽车,发动机内有四个汽缸,其相关数据如下表所示:
(1)汽车发动机工作时通常用水来冷却,原因是水的______ 较大。
(2)汽车的排气量是指发动机汽缸的工作容积,汽车排气量越大,功率越大。空燃比指汽缸内空气和燃油的质量比。当发动机1min内完成的工作循环为2600次时,发动机达到最大功率,则根据表中数据求出汽车发动机的效率是______ 。(计算结果保留一位小数)
| 1min内完成的 工作循环 | 2600次 | 92#汽油 | 汽缸内汽油和空气的混合密度 | 1.35kg/m3 |
| 排气量 | 1.8L | 热值 | 4.6×107(J/kg) | |
| 发动机最大功率 | 75kW | 空燃比 | 14:1 |
(1)汽车发动机工作时通常用水来冷却,原因是水的
(2)汽车的排气量是指发动机汽缸的工作容积,汽车排气量越大,功率越大。空燃比指汽缸内空气和燃油的质量比。当发动机1min内完成的工作循环为2600次时,发动机达到最大功率,则根据表中数据求出汽车发动机的效率是
您最近一年使用:0次
综合题
|
困难
(0.15)
解题方法
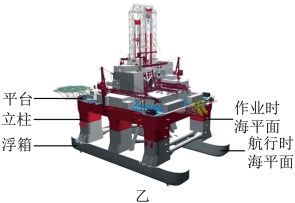
【推荐3】半潜式钻井平台是一种可在深海开采可燃冰的巨型设备,其工作原理图如下图乙,它由平台、立柱和浮箱组成。半潜式钻井平台在海面上通常有两种工作状态:处于漂浮状态时,浮箱有少部分露出水面,以便在海上航行;处于半潜状态时,浮箱整体潜入水面以下一定深度,这样的设计增强了开采作业时整个设备抗风浪的能力。
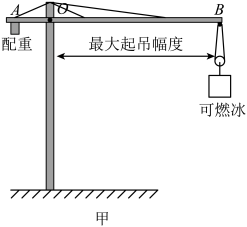
(1)平台上的塔式起重机如图甲所示竖直起吊可燃冰时,由杠杆的平衡条件可知,塔式起重机的起重量随起吊幅度而变化,起吊幅度越大,起重量___________ ;
(2)平台上的塔式起重机是通过电动机带动滑轮组(重力忽略不计)竖直起吊可燃冰的,已知起吊重为6×104N的可燃冰时,此时最大起吊幅度是配重到O点距离的5倍且吊臂上方的绳子刚好都不承力。假设此时电动机的输出功率为80kW,不考虑能量损失时使可燃冰匀速上升80m;求:
①配重重___________ ;
②这次起吊过程所用时间___________ ;
(3)立柱的作用是一方面将上层的平台固定在浮箱上,另一方面在半潜状态时提供一定的浮力,使平台在海上更加稳定。图中半潜式钻井平台设计有四根立柱,每根立柱可当作底面积200m2、高30m的长方体。漂浮状态时,浮箱有部分体积露在水面以上,此时半潜式钻井平台总质量为3.2×107kg;向浮箱内部的压载水舱注入适量的海水,由漂浮状态变成半潜状态,总质量变成5.6×107kg,立柱浸入水中的深度为25m。(忽略左右立柱之间起固定作用的连接横杆的体积)。求:
①半潜状态时水对每个立柱底端的压强___________ ;
②漂浮状态时浮箱露出水面的体积___________ 。
(1)平台上的塔式起重机如图甲所示竖直起吊可燃冰时,由杠杆的平衡条件可知,塔式起重机的起重量随起吊幅度而变化,起吊幅度越大,起重量
(2)平台上的塔式起重机是通过电动机带动滑轮组(重力忽略不计)竖直起吊可燃冰的,已知起吊重为6×104N的可燃冰时,此时最大起吊幅度是配重到O点距离的5倍且吊臂上方的绳子刚好都不承力。假设此时电动机的输出功率为80kW,不考虑能量损失时使可燃冰匀速上升80m;求:
①配重重
②这次起吊过程所用时间
(3)立柱的作用是一方面将上层的平台固定在浮箱上,另一方面在半潜状态时提供一定的浮力,使平台在海上更加稳定。图中半潜式钻井平台设计有四根立柱,每根立柱可当作底面积200m2、高30m的长方体。漂浮状态时,浮箱有部分体积露在水面以上,此时半潜式钻井平台总质量为3.2×107kg;向浮箱内部的压载水舱注入适量的海水,由漂浮状态变成半潜状态,总质量变成5.6×107kg,立柱浸入水中的深度为25m。(忽略左右立柱之间起固定作用的连接横杆的体积)。求:
①半潜状态时水对每个立柱底端的压强
②漂浮状态时浮箱露出水面的体积
您最近一年使用:0次
综合题
|
困难
(0.15)
【推荐1】如图所示为某型号压力机,整机质量18t,行驶速度27km/h,发动机功率110kW.已知柴油的热值q=4.3×107J.请回答下列问题:

(1)压路机碾子质量很大是通过_____ 来增大压强,驾驶室内座椅做得宽大是为了_____ (选填“增大”或“减小”压强).
(2)该压路机以27 km/h的速度匀速通过150m的距离需要多少时间________ ?
(3)该压路机通过此段路程所受的阻力多大______ ?
(4)若该压路机柴油发动机的效率为40%,通过此段路程需要完全燃烧多少千克柴油_______ ?
(1)压路机碾子质量很大是通过
(2)该压路机以27 km/h的速度匀速通过150m的距离需要多少时间
(3)该压路机通过此段路程所受的阻力多大
(4)若该压路机柴油发动机的效率为40%,通过此段路程需要完全燃烧多少千克柴油
您最近一年使用:0次
综合题
|
困难
(0.15)
解题方法
【推荐2】我国自行设计的“蛟龙号”载人潜水器(如图甲)外壳选择了钛合金板做主材,其主要技术参数如下表。蛟龙号带有适当数量的压载铁,通过改变压载铁的数量,来控制其下沉或上浮,采用科学家们研发的具有世界先进水平的高速水声通信技术,即声呐通信。
(1)“蛟龙号”的电源是由多节充油银锌蓄电池串联而成,这种电源的“比能量”约为15kW·h/kg,“比能量”是指电池单位质量所输出的电能。这种蓄电池的放电电压随时间的变化规律如图乙,可以用50A的电流连续放电5h。“蛟龙号”工作时,需要的总能量约为60kW·h,则其电源的质量约为______ kg,为了对“蛟龙号”正常供电,串联的蓄电池不得少于______ 节;
(2)“蛟龙号”采用“深潜器无动力下潜上浮技术”,其两侧配备4块相同的压载铁,当其到达设定深度时,可抛卸其中2块压载铁,使其处于悬浮状态,从而实现各种试验作业,当“蛟龙号”悬停在工作区时,每块压载铁的体积为多少立方米时,才能使“蛟龙号”最大负载时实现悬浮静止状态;( ) [设海水密度与水的密度相同,ρ铁=8×103kg/m3,g=10N/kg]
(3)“蛟龙号”抛卸所有压载铁后上浮,乘员取出载荷上岸后,“蛟龙号”漂浮在海面上,由起重装置将其匀速竖直吊离水面,起重装置起吊拉力的功率随时间变化的图象如图所示,图丙中P2=2P1,则t1时刻“蛟龙号”的排水体积为多少立方米?(不考虑水的阻力)( )

| 自身体积/m3 | 50 | 最大速度/节 | 25 |
| 自身质量/kg | 2.14×104 | 最大载荷(不包括乘员体重)/kg | 390 |
| 最大下潜深度/m | 7000 | 乘员质量/kg | 210 |
(2)“蛟龙号”采用“深潜器无动力下潜上浮技术”,其两侧配备4块相同的压载铁,当其到达设定深度时,可抛卸其中2块压载铁,使其处于悬浮状态,从而实现各种试验作业,当“蛟龙号”悬停在工作区时,每块压载铁的体积为多少立方米时,才能使“蛟龙号”最大负载时实现悬浮静止状态;
(3)“蛟龙号”抛卸所有压载铁后上浮,乘员取出载荷上岸后,“蛟龙号”漂浮在海面上,由起重装置将其匀速竖直吊离水面,起重装置起吊拉力的功率随时间变化的图象如图所示,图丙中P2=2P1,则t1时刻“蛟龙号”的排水体积为多少立方米?(不考虑水的阻力)
您最近一年使用:0次
【推荐3】读短文,回答问题:
无侦-10是中国研制的一款高空稳形察打一体无人机,搭载新一代涡扇发动机,飞行速度可达300m/s,战场响应快.飞机采用以光纤传输信号的光传操纵系统.该机最大起飞重量3.2吨,主要用于电子侦察,对敌方信号进行侦查和定位,载弹量要逊色一些,只有400kg,翼载指飞机的最大起飞质量与机翼面积的比值;热效率是指发动机获得的机械能与燃料完全燃挠产生的内能之比,而推进效率则是指发动机传递给飞机的推进功(推力所做的功)与其获得的机械能之比,飞机航行时所受阻力与速度的关系见表一,部分技术参数见表二,(g取10N/kg)

表一:
表二:
(1)飞机光传操纵系统中的传输媒介是__________ (选填“导体”“绝缘体”或“半导体”),飞机表面能__________ (选填“反射”或“吸收”)对方雷达发射的电磁波从而实现隐身;
(2)关于无人机,下列说法中不正确的__________ ;
A.遥控无人机是通过电磁被来传递信息的
B.机翼做成流线型是为了减小空气的阻力
C.当飞机顺风起飞时,更有利于飞机升空
D.飞机在一定高度匀速飞行投弹时机械能变小
(3)当飞机以最大速度沿水平方向飞行时,推力做功的功率为__________ W。飞机的推重比是指飞机以最大航行速度匀速飞行时的推力与最大起飞重力的比值,则无侦-10的推重比约为__________ ;
(4)该飞机的翼载为500kg/m2,则机翼面积为__________ m2。当飞机以200m/s的速度沿水平方向正常巡航0.5h,耗油__________ kg;
表三:
(5)为保证飞行安全,当飞机降低到一定高度时开启警示灯,如图乙是小明设计的模拟电路(电源电压恒定),压敏电阻R与离地高度h的关系见表三。当飞机降低到距地面450m时,开关S闭合警示灯亮,灵敏电流计示数为0.02A;当飞机距地面400m时,灵敏电流计示数为0.04A:当飞机距地面150m时,警示灯开始明暗交替变化,应将压敏电阻R将串联在图乙电路中的__________ (选择“A”或“B”)位置,另一位置接入灵敏电流计(高度表)。当警示灯处于较暗状态时的电功率是__________ W(电磁铁线圈、衔铁电阻忽略不计,警示灯电阻不随温度变化)。
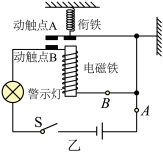
察打一体无人机
无侦-10是中国研制的一款高空稳形察打一体无人机,搭载新一代涡扇发动机,飞行速度可达300m/s,战场响应快.飞机采用以光纤传输信号的光传操纵系统.该机最大起飞重量3.2吨,主要用于电子侦察,对敌方信号进行侦查和定位,载弹量要逊色一些,只有400kg,翼载指飞机的最大起飞质量与机翼面积的比值;热效率是指发动机获得的机械能与燃料完全燃挠产生的内能之比,而推进效率则是指发动机传递给飞机的推进功(推力所做的功)与其获得的机械能之比,飞机航行时所受阻力与速度的关系见表一,部分技术参数见表二,(g取10N/kg)
表一:
速度v/(m/s) | 100 | 150 | 200 |
阻力f/N | 500 | 1125 | 2000 |
热效率η1 | 推进效率用η2 | 航空燃油的热值q |
40% | 60% | 5×107J/kg |
(2)关于无人机,下列说法中不正确的
A.遥控无人机是通过电磁被来传递信息的
B.机翼做成流线型是为了减小空气的阻力
C.当飞机顺风起飞时,更有利于飞机升空
D.飞机在一定高度匀速飞行投弹时机械能变小
(3)当飞机以最大速度沿水平方向飞行时,推力做功的功率为
(4)该飞机的翼载为500kg/m2,则机翼面积为
表三:
高度h/m | 150 | 400 | 450 |
电阻R/Ω | 20 | 50 | 200 |
您最近一年使用:0次
综合题
|
困难
(0.15)
【推荐1】如图甲,是学校饮水间安装的某款温热饮水机。该饮水机既能提供温度为100℃的开水,也能提供温度可直接饮用的温开水,该饮水机的相关参数见表;

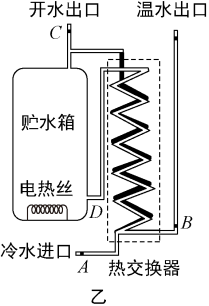
该饮水机内部结构如图乙所示。首次使用时,经紫外线灯照射的20℃冷水,从冷水进口A处流入,经热交换器进入贮水箱。水箱加满水开始加热,将水加热到100℃;
(1)若不考虑热损失,首次加热多长时间可以喝到开水?______
(2)首次加热后,热水器就能正常使用了。热水器正常使用时,通过加压使贮水箱中的开水进入热交换器内,20℃冷水则由进口阀门进入热交换器,通过热交换器热交换后,热水进入贮水箱会被继续加热至100℃,温水出口流出的就是40℃的温水了、如此正常工作,就可不断得到开水和温水了。若某学校学生1h所需的开水和温水的质量之比是 ,且饮水机的热效率为91%,则饮水机正常工作1h最多供应开水多少升?
,且饮水机的热效率为91%,则饮水机正常工作1h最多供应开水多少升?______
(3)如图丙所示为饮水机温控装置原理图,该装置控制水箱中电热丝工作,其中R为热敏电阻, 为可调电阻。当线圈的电流大于或等于某一值时,继电器的衔铁被吸下,图丁为热敏电阻R-t图象;
为可调电阻。当线圈的电流大于或等于某一值时,继电器的衔铁被吸下,图丁为热敏电阻R-t图象;
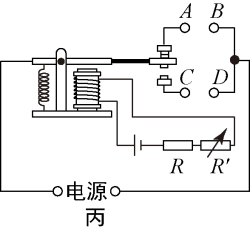

①应该把贮水箱内的电热丝接在______ (选填“A、B间”或“C、D间”);
②该饮水机从海拔高的区域移动到海拔低的区域使用,为了确保水能沸腾,可调电阻 的阻值应
的阻值应______ (选填“调大”、“不变”或“调小”)。
| 温热饮水机型号 | ××× |
| 贮水箱容量 |  |
| 功率 |  |
| 电源 |  |
该饮水机内部结构如图乙所示。首次使用时,经紫外线灯照射的20℃冷水,从冷水进口A处流入,经热交换器进入贮水箱。水箱加满水开始加热,将水加热到100℃;
(1)若不考虑热损失,首次加热多长时间可以喝到开水?
(2)首次加热后,热水器就能正常使用了。热水器正常使用时,通过加压使贮水箱中的开水进入热交换器内,20℃冷水则由进口阀门进入热交换器,通过热交换器热交换后,热水进入贮水箱会被继续加热至100℃,温水出口流出的就是40℃的温水了、如此正常工作,就可不断得到开水和温水了。若某学校学生1h所需的开水和温水的质量之比是
,且饮水机的热效率为91%,则饮水机正常工作1h最多供应开水多少升?(3)如图丙所示为饮水机温控装置原理图,该装置控制水箱中电热丝工作,其中R为热敏电阻,
为可调电阻。当线圈的电流大于或等于某一值时,继电器的衔铁被吸下,图丁为热敏电阻R-t图象;①应该把贮水箱内的电热丝接在
②该饮水机从海拔高的区域移动到海拔低的区域使用,为了确保水能沸腾,可调电阻
的阻值应
您最近一年使用:0次
综合题
|
困难
(0.15)
名校
解题方法
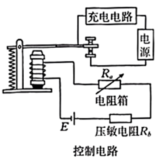
【推荐2】新能源汽车近年来发展迅猛,某款国产新能源汽车深受消费者青睐,相比其他新能源汽车,它具有续航里程长、充电速度快的优点,妞妞家也购买了一辆,同时安装了充电桩把交流电转换为直流电给车充电,充电桩铭牌上的部分参数如下表所示。在 2024年春季,妞妞的妈妈驾驶该车在平直公路上以100km/h的速度匀速直线行驶了10km,所受的阻力恒为2700 N。(不计电磁铁线圈的阻值,g 取10 N/kg)
(1)电能属于___________ (选填“一次”或“二次”)能源;
(2)当该电车在平直公路上以108km/h的速度匀速直线行驶时,其牵引力做功的功率是多少?___________
(3)该电车电池的容量为 ,从完全没电到充电至 70%的电量,充电桩在正常状态下需要工作多少时间?
,从完全没电到充电至 70%的电量,充电桩在正常状态下需要工作多少时间?___________
(4)为了使用安全,只有充电插头和插座间的压力 时(此时控制电路中的电流
时(此时控制电路中的电流 ),充电电路才能接通,其原理如图所示,不充电时(F=0N)控制电路中的电流为40 mA。已知电阻箱接入电路的电阻
),充电电路才能接通,其原理如图所示,不充电时(F=0N)控制电路中的电流为40 mA。已知电阻箱接入电路的电阻 ,压敏电阻阻值与所受压力的计算关系式为:
,压敏电阻阻值与所受压力的计算关系式为: ,请你通过计算判断控制电路中的电源电压属于人体安全电压的哪一级。
,请你通过计算判断控制电路中的电源电压属于人体安全电压的哪一级。___________
(1)电能属于
(2)当该电车在平直公路上以108km/h的速度匀速直线行驶时,其牵引力做功的功率是多少?
(3)该电车电池的容量为
,从完全没电到充电至 70%的电量,充电桩在正常状态下需要工作多少时间?(4)为了使用安全,只有充电插头和插座间的压力
时(此时控制电路中的电流),充电电路才能接通,其原理如图所示,不充电时(F=0N)控制电路中的电流为40 mA。已知电阻箱接入电路的电阻,压敏电阻阻值与所受压力的计算关系式为:,请你通过计算判断控制电路中的电源电压属于人体安全电压的哪一级。落地式充电桩 | |
额定输入电压:220 V 交流 | 额定输出电压:500 V 直流 |
额定输入电流:100 A 交流 | 额定输出电流:40 A 直流 |
防护等级:IPS4 | 使用环境:室外 |
人体安全电压等级 | 应用场所 |
Ⅰ(42 V) | 有触电危险的手持电动工具 |
Ⅱ(36 V) | 比较干燥的一般场所 |
Ⅲ(24 V) | 潮湿、有导电金属粉尘等场所 |
N(12 V) | 特别潮湿、金属容器等人体大面积接触带电体的场所 |
V(6 V) | 水下作业 |
您最近一年使用:0次
综合题
|
困难
(0.15)
名校
解题方法
【推荐3】阅读短文,回答问题
无人机有竖直方向的三档风力和水平方向的两档风力,其中竖直方向的升力与风叶转速的平方成正比,对应关系如表二。产生的升力与风叶转速之比叫做动率,升力与每秒钟通过风叶空气重力之比为转力效率。
表二
(1)无人航拍机在空中悬停、飞行、降落、航拍、降落过程中,下列说法中正确的是____________ ;
A.利用超声波对无人机进行遥控的
B.无人机风叶材料很多采用碳纤维,是因为碳纤维的密度较大
C.工作时发出的声音不会对人的听力造成损伤
D.无人机匀速直线飞行时,机械能一定不变。
(2)起飞时,增大风叶的转速,使吹向下方的风量增加,增大了无人机向上的升力,当风叶转速为1.2×103r/min时,获得的向上的升力为____________ N;
(3)该无人机正常工作时的电流为____________ A;充满电后至下一次自动充电,能够提供无人机工作的机械能为____________ J;
(4)由表二数据可知,当转速为1.4×103r/min时,无人机的动率为____________ N·min/103r。上述转速下,若风叶的转圈时扫过的面积为0.28m2,空气被吹动的速度为3m/s,则1min内通过风叶的空气总质量为____________ kg,转力效率为____________ %;(p空气=1.3kg/m3)
(5)光敏电阻是制作感光器材的常用元件,其阻值随受光强度的增加而减少。在无人机的航拍镜头中,加入光敏电阻电路可自动控制进入镜头的光强度,电子镜头的透光能力随着受控电压的增加而增加,如图乙所示,RG为光敏电阻,R0为定值电阻,无人机的航拍镜头中将电子镜头电路与____________ (光敏/定值)电阻相并联。
无人航拍机
无人驾驶飞机简称“无人机”是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。如图甲所示是目前较为流行的某型号无人航拍机,当剩余电量减为电池容量的10%时,无人航拍机会自动下降并停留地面等待充电。表一为某型号无人航拍机的部分参数,其中的电池容量是指放电电流与放电总时间的乘积。
额定电压/V | 6 | 额定功率/W | 42 |
电池容量/mAh | 1500 | 工作噪音/dB | <50 |
遥控距离/m | 200 | 整机质量/g | 500 |
充电时间/min | 200 | 电机转化效率/% | 90 |
表二
风叶转速/(103r/min) | 1 | 1.2 | 1.4 |
升力/N | 4 | ||
动率/(N·min/103r) | 4 |
A.利用超声波对无人机进行遥控的
B.无人机风叶材料很多采用碳纤维,是因为碳纤维的密度较大
C.工作时发出的声音不会对人的听力造成损伤
D.无人机匀速直线飞行时,机械能一定不变。
(2)起飞时,增大风叶的转速,使吹向下方的风量增加,增大了无人机向上的升力,当风叶转速为1.2×103r/min时,获得的向上的升力为
(3)该无人机正常工作时的电流为
(4)由表二数据可知,当转速为1.4×103r/min时,无人机的动率为
(5)光敏电阻是制作感光器材的常用元件,其阻值随受光强度的增加而减少。在无人机的航拍镜头中,加入光敏电阻电路可自动控制进入镜头的光强度,电子镜头的透光能力随着受控电压的增加而增加,如图乙所示,RG为光敏电阻,R0为定值电阻,无人机的航拍镜头中将电子镜头电路与
您最近一年使用:0次


