1 . 利用如图所示的装置来探究“杠杆的平衡条件”。__________ ;
(2)保持B点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂L和动力F的数据,绘制了L1—F1的关系图,如图丙所示,请根据图推算,当L1为0.6m时,F1为_______ N;

(2)保持B点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂L和动力F的数据,绘制了L1—F1的关系图,如图丙所示,请根据图推算,当L1为0.6m时,F1为
您最近一年使用:0次
2 . 如图装置为科技创新大赛时发明的可以直接测量液体密度的“密度天平”。其制作过程和原理如下:选择一根长1.2米的均匀杠杆,支点在其中点。调节两边螺母使杠杆在水平中位置平衡,在左侧离中点10厘米的位置用细线固定一个质量为120克,容积为80毫升的容器,右侧用细线悬挂一质量为40克的钩码(细线的质量忽略不计)),测量时往容器中加满待测液体,移动钩码使杠杆在水平位置平衡,在钩码悬挂位置直接读出液体的密度。_______ 厘米处;
(2)该“密度天平”的最大刻度值为___________ kg/m3;
(3)该“密度天平”的刻度是_______ (选填“均匀”或者“不均匀”)的。
(4)写出一种增大“密度天平”量程的方法___________ 。

(2)该“密度天平”的最大刻度值为
(3)该“密度天平”的刻度是
(4)写出一种增大“密度天平”量程的方法
您最近一年使用:0次
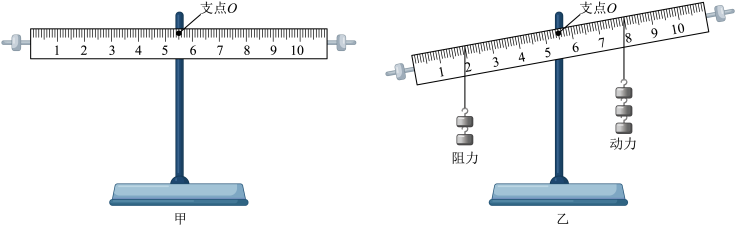
3 . 某同学想利用筷子对杠杆平衡条件进行研究:______ (选填“平衡”或“不平衡”) 状态;
(2) 调节筷子水平位置平衡后,分别在两边挂钩码至平衡如图乙所示,则LA∶LB______ 2∶3(选填“>”或“=”或“<”);
(3) 保持左端钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂l1和动力 F1的数据,绘制了 l1-F1的关系图像,如图丙所示。请根据图像推算,当 l1为0.03m时, F1为_______ N。

(2) 调节筷子水平位置平衡后,分别在两边挂钩码至平衡如图乙所示,则LA∶LB
(3) 保持左端钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂l1和动力 F1的数据,绘制了 l1-F1的关系图像,如图丙所示。请根据图像推算,当 l1为0.03m时, F1为
您最近一年使用:0次
4 . 在探究“杠杆的平衡条件”的实验中:__________ (填“左侧”或“右侧”)调节平衡螺母,使杠杆在没有挂钩码时,保持水平位置平衡。这样做的好处是:__________ ;
(2)杠杆在水平位置平衡后,在杠杆两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡。然后改变动力和动力臂,相应调节阻力和阻力臂,再做几次实验,再做几次实验的目的是__________ ;
(3)如图乙,当货车所载货物重心太靠后时,货车会翘起来,这样容易造成交通安全事故。若以汽车的后轮为支点,货物对货车压力F的力臂用L1表示,货车重力G的力臂用L2表示,货车之所以会翘起来,是因为FL1__________ GL2(选填“>”、“=”或“<”)。

(2)杠杆在水平位置平衡后,在杠杆两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡。然后改变动力和动力臂,相应调节阻力和阻力臂,再做几次实验,再做几次实验的目的是
(3)如图乙,当货车所载货物重心太靠后时,货车会翘起来,这样容易造成交通安全事故。若以汽车的后轮为支点,货物对货车压力F的力臂用L1表示,货车重力G的力臂用L2表示,货车之所以会翘起来,是因为FL1
您最近一年使用:0次
5 . 小科在探究“杠杆平衡条件”的实验装置如图所示,每个钩码质量都相等。________ 个相同的钩码;
(2)某同学用图乙装置进行探究,发现当杠杆水平平衡时,与杠杆平衡条件不相符,其可能的原因是________ ;
(3)实验中小科曾提出“力的作用点到支点的距离影响杠杆的平衡”。为判断这一观点是否正确,小华制作了一个密度均匀的圆盘(相当于杠杆)进行探究,圆盘可以绕着圆心O转动(转轴阻力忽略不计),如图丙所示。他先在圆盘的C点挂上4个钩码,又在G点挂上一定数量的钩码后,圆盘在图示位置平衡,此时CD水平;接着他将挂在G点的钩码先后挂在D、N两个点又进行了两次实验。若观察到________ 现象,则说明小科的观点是错误的。

(2)某同学用图乙装置进行探究,发现当杠杆水平平衡时,与杠杆平衡条件不相符,其可能的原因是
(3)实验中小科曾提出“力的作用点到支点的距离影响杠杆的平衡”。为判断这一观点是否正确,小华制作了一个密度均匀的圆盘(相当于杠杆)进行探究,圆盘可以绕着圆心O转动(转轴阻力忽略不计),如图丙所示。他先在圆盘的C点挂上4个钩码,又在G点挂上一定数量的钩码后,圆盘在图示位置平衡,此时CD水平;接着他将挂在G点的钩码先后挂在D、N两个点又进行了两次实验。若观察到
您最近一年使用:0次
6 . 实验是科学研究的重要手段。_______ N;
(2)如图乙为水流抽气泵的结构示意图,当水不断地从上往下流动时,A的气压会小于待抽气容器,请分析图丙中的过滤方式与普通过滤方式相比,所具有的优点是_____________ 。
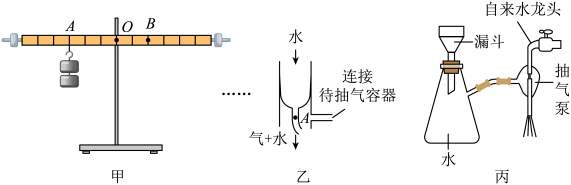
(2)如图乙为水流抽气泵的结构示意图,当水不断地从上往下流动时,A的气压会小于待抽气容器,请分析图丙中的过滤方式与普通过滤方式相比,所具有的优点是
您最近一年使用:0次
7 . 小南进行了如下实验,探究“杠杆平衡的条件”。 ___________ (选填“左”或“右”)调节,直到杠杄在水平位置平衡;
(2)小南决定先保持阻力F2和阻力臂l2不变,如图乙所示探究“杠杆平衡时,动力臂和动力之间的关系”。通过实验得到的数据如表所示。分析表中的数据,小南得出的结论是________ 。
(3)小南按图乙所示完成实验后。接着始终竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丙所示。此过程中,弹簧测力计拉力的力臂___________ (选填“变大”、“变小”或“不变”,下同),拉力的大小___________ 。
(4)小南还想探究“当动力和阻力在杠杆同侧时杠杆的平衡情况”,于是他将杠杆左侧的所有钩码拿掉,结果杠杆转至竖直位置。再在杠杆右侧施加一个始终水平向右的拉力F,如图丁所示,却发现无论用多大的力都不能将杠杆拉至水平位置平衡。你认为原因是___________ 。

| 实验序号 | 动力F1/牛 | 动力臂l1/米 |
| 1 | 0.5 | 0.20 |
| 2 | 1.0 | 0.10 |
| 3 | 1.5 | 0.07 |
| 4 | 2.0 | 0.05 |
| 5 | 2.5 | 0.04 |
(3)小南按图乙所示完成实验后。接着始终竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丙所示。此过程中,弹簧测力计拉力的力臂
(4)小南还想探究“当动力和阻力在杠杆同侧时杠杆的平衡情况”,于是他将杠杆左侧的所有钩码拿掉,结果杠杆转至竖直位置。再在杠杆右侧施加一个始终水平向右的拉力F,如图丁所示,却发现无论用多大的力都不能将杠杆拉至水平位置平衡。你认为原因是
您最近一年使用:0次
8 . 学习了杠杆知识后,小红利用身边的物品来探究杠杆的平衡条件。她所选择的器材有:铅笔、橡皮若干(每块橡皮质量为10g)、细线、刻度尺、弹簧测力计等。___________ (左/右)移动;
(2)调节水平平衡后,用细线绑定数量不等的橡皮挂在杠杆支点两侧,如图乙所示。做了几次实验后,将数据记录在如下表中。得出结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”;
小江认为该结论不正确,则小江接下来的操作是 ___________ ;
A.改变力的大小,测出支点到作用点的距离测多组数据
B.改变力的方向,测出支点到力的作用线的距离,测多组数据
(3)铅笔水平平衡后,小敏不小心将前端细长的铅笔芯弄断了(如图丙),她立刻将铅笔稳住,并将铅笔芯放到左端细线下方固定(如图丁),则铅笔___________ 。
A.右端下沉
B.左端下沉
C.仍然水平平衡

(2)调节水平平衡后,用细线绑定数量不等的橡皮挂在杠杆支点两侧,如图乙所示。做了几次实验后,将数据记录在如下表中。得出结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”;
次数 | 动力F1(N) | 支点到动力作用点的距离l1(m) | 阻力F2(N) | 支点到阻力作用点的距离l2(m) |
1 | 0.2 | 0.04 | 0.4 | 0.02 |
2 | 0.2 | 0.04 | 0.1 | 0.08 |
3 | 0.3 | 0.05 | 0.3 | 0.05 |
A.改变力的大小,测出支点到作用点的距离测多组数据
B.改变力的方向,测出支点到力的作用线的距离,测多组数据
(3)铅笔水平平衡后,小敏不小心将前端细长的铅笔芯弄断了(如图丙),她立刻将铅笔稳住,并将铅笔芯放到左端细线下方固定(如图丁),则铅笔
A.右端下沉
B.左端下沉
C.仍然水平平衡
您最近一年使用:0次
9 . 在“探究杠杆的平衡条件”实验时,应将横梁的中央支在支架上,如图甲所示。___________ ;
(2)杠杆若处于图乙所示位置静止也属于平衡。小晨在此位置也测量并记录了几组数据如下表所示:
据表中数据分析发现,动力和动力臂的乘积始终大于阻力和阻力臂的乘积,且两者差值总是相同。对其原因分析,下列正确的是___________ 。
A.直接读取横梁示数并认为此是力臂
B.支点O在横梁重心上方,导致杠杆自重不能忽略
C.力臂测量方法正确,但其读数存在偏差
(2)杠杆若处于图乙所示位置静止也属于平衡。小晨在此位置也测量并记录了几组数据如下表所示:
| 实验次数 | 动力/N | 动力臂/ | 阻力/N | 阻力臂/ |
| 1 | 2 | 3 | 1.5 | 3.6 |
| 2 | 4 | 3 | 3 | 3.6 |
| 3 | 5 | 2 | 4 | 2.2 |
A.直接读取横梁示数并认为此是力臂
B.支点O在横梁重心上方,导致杠杆自重不能忽略
C.力臂测量方法正确,但其读数存在偏差
您最近一年使用:0次
10 . 如图所示,小刘在做探究杠杆平衡条件的实验时,杠杆处于平衡状态;若将左侧增加2个钩码,右侧增加1个钩码,则杠杆会( )

| A.仍然平衡 | B.向左端倾斜 |
| C.向右端倾斜 | D.无法判断 |
您最近一年使用:0次


