
(1)若把铜铃放在甲、乙的中点,则液晶显示屏的示数
(2)一同学将铜铃放到甲的左边,并与乙在一条直线上,则铜铃离甲越远,液晶显示屏的数值
(3)一同学想验证温度越高,声速越大,把铜铃固定放在甲的左边,然后加热甲乙之间的空气,则液晶显示屏的数值将
A、变大; B、变小; C、不变; D、无法判断
(4)已知S1=20cm,S2=80cm,液晶显示屏上显示:1.800,则此时声速约为多少m/s。
安全舒适的家用轿车
为了让司乘人员有安全舒适的驾乘体验,某款家用小轿车配有U型座椅、抬头显示器、倒车雷达、麦弗逊式悬架、真空轮胎等装置。汽车座椅设计成能增大乘客与座椅接触面积的U型。座椅内部装有电热装置,冬季使用时,人坐上去温暖舒适。图甲为座椅电热装置的电路原理图,电源电压恒定,装置设有“高温”、“低温”、“关”三个档位,其中高温功率为36W,低温功率为9W。

车轮选用真空轮胎,即无内胎的充气轮胎,空气直接充进轮胎内腔。车辆高速行驶时,由于轮胎和路面摩擦而产生的温度,由内部空气经钢圈直接传递出去,快速降低轮胎温度;轮胎的负荷指轮胎承受的压力,与轮胎气压有关,下表是汽车静止时在轮胎发生标准形变的条件下,每只轮胎的负荷F与轮胎气压p的参数。
| 气压p/kPa | 120 | 150 | 180 | 200 | 240 |
| 负荷F/N | 2920 | 3400 | 3880 | 4200 | 4840 |
(2)下列有关汽车的说法中不正确的是
A.轮胎的钢圈是热的良导体
B.倒车雷达原理与“声呐测距”相同
C.U型座椅是为了增大压强
D.弹簧和减振器被压缩时弹性势能增大
(3)座椅处于低温档正常工作5min消耗的电能为
(4)文中划线部分描述中存在错误,请写出描述错误的文字并改正:
(5)用两根轻弹簧可以模拟汽车悬架。如图丙,在一根大弹簧内套有一根小弹簧,它们的下端都固定在水平面上,压缩该弹簧组合,测得压力F与压缩距离
 之间的关系图线如图丁所示。已知弹簧中的弹力与被压缩的距离成正比,则当两弹簧均处于自由状态时,它们上端点间的距离为x=
之间的关系图线如图丁所示。已知弹簧中的弹力与被压缩的距离成正比,则当两弹簧均处于自由状态时,它们上端点间的距离为x= 之间的定量关系式可表示为F2=
之间的定量关系式可表示为F2=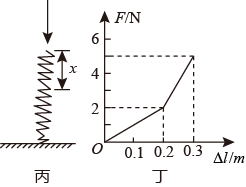
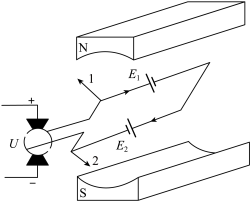
电动机的能量电动机利用通电线圈在磁场里转动的原理,把电能转化为机械能。若电动机输入端的电压为U,且电动机不加任何负载,那么在电动机接通瞬间,线圈没有转动,因而此时电流可以计算为: ,这个是欧姆定律得出的结论。但当电动机的线圈在磁场里转动时,线圈导线切割磁感线,所以在线圈中必然要产生感应电压,我们把它称作感应电动势E,因其方向跟外加电压的方向相反,通常把这个感应电动势称作反电动势。记做
,这个是欧姆定律得出的结论。但当电动机的线圈在磁场里转动时,线圈导线切割磁感线,所以在线圈中必然要产生感应电压,我们把它称作感应电动势E,因其方向跟外加电压的方向相反,通常把这个感应电动势称作反电动势。记做 。线圈的两条侧边都会切割磁感线,同时产生感应电动势,如图所示,其大小分别为
。线圈的两条侧边都会切割磁感线,同时产生感应电动势,如图所示,其大小分别为 和
和 ,反电动势
,反电动势 ,这样加在线圈上的实际电压不再是U了,而变成了
,这样加在线圈上的实际电压不再是U了,而变成了 。
。
从能量上看,由于存在着反电动势,有一部分电能转化为机械能,电功并不等于电热,此时电路供给电动机的功率(输入功率)UI,转化为机械能的功率(输出功率)E反I,以及线圈上的热功率I2R两部分。
(1)如果用E反表示反电动势,U表示外加电压,R表示线圈电阻,那么电动机工作时通过线圈的电流强度等于(2)若一台额定电压为3V的小直流电动机正常工作时,正常转动时反电动势为2.4V,线圈的电阻为2Ω,该电动机正常转动时将电能转化为机械能的效率为
空心锤子
在生产、生活和科学实验中,我们常常要使用锤子。如在墙上钉钉子时,我们用锤子反复击打钉子,钉子便进入墙里。但是,在宇宙空间,当宇航员用锤子敲击物体时,锤子给物体一个作用力,物体受力运动的同时,人和锤子也会向背离物体的方向运动,并且敲击时的作用力越大,人和锤子就会被弹的越远,根本无法进行再次敲击怎样解决这一问题呢?
科学家把宇航员用的锤子设计成空心的,并在里面装入一定量的钢砂,当手握锤子敲击物体时,锤子会把受到的反作用力传给钢砂,使原来处于相对静止的钢砂运动起来。钢砂运动产生的相互摩擦克服了此状态下的反作用力,同时产生热量,减慢了锤子的运动,使锤子不会反跳起来。由此攻克了在宇宙空间不能用锤子反复敲打物体的难题。
(1)用锤子击打钉子时,锤子对钉的作用力
(2)用锤子击打钉子时,钉子由于
(3)文中叙述到物体受力运动的同时,人和锤子也会反向运动,这说明物体间力的作用是
(4)敲击时的作用力越大,人和锤子就会被弹飞得的越远,是因为力的
中国空间站首次太空授课
2021年12月9日,在距地球表面400公里以外的中国空间站天和核心舱内,神舟十三号飞行乘组3名“太空教师”翟志刚、王亚平、叶光富为全国青少年带来了一堂奇妙又精彩的太空科普课。
叶光富展示太空走路和太空转身,这些原本在地面上难度系数为零的普通动作,在太空中却变得十分困难。只见叶光富飘浮在空中,没有借助把手的他上半身向左旋转的时候,下半身就会朝右旋转,上半身朝右旋转,下半身就会朝左转,上下总是拧着。当他举起右手,在空中画圈,随着圈越画越快,他开始缓慢地旋转了!而当他将手臂展开时,旋转开始变慢,手臂收回时旋转变得快了起来。
在王亚平展示的水球实验中,我们能够看到,在给水球注入气泡前,透过水球可以观察到航天员的倒立人像。用注射器向水球内注入空气,在水球内产生了一个标准的球形气泡,还能看到一正一反两个成像,“这是气泡将水球分割成了两部分,分别成像的结果”。
同学们,太空梦永不失重!科技梦张力无限!科学无处不在,未来属于你们!
根据短文和图片,回答下列问题:

(1)在太空中走路十分困难,因为没有重力,和地面没有
(2)水球实验中,可以看到王亚平倒立的像,是
(3)航天员在完全失重的太空轨道舱中,不能正常进行的实验是
A.用天平测量质量
B.用刻度尺测量长度
C.用弹簧测力计测量拉力
D.用量筒测水的体积
(4)与地球上相比,航天器在太空的质量
天宫空间站
2021年10月16日,神舟十三号载人飞船与空间站组合体完成自主快速交会对接,这将开启中国空间站迄今为止宇航员驻留时间最长的任务。为了激发青少年对科学的热爱,航天员进行了“天宫”授课活动,由于太空中的空间站能够提供独特的“完全失重”环境(物体在空间站运动时等效于不受重力),可以更有利于演示一些实验现象。在直播中发现宇航员在用脚蹬天宫站的内壁时,其会向相反方向运动,用手拉住扶手可以让宇航员停下来,在上课时,王亚平向前抛出一个北京冬奥会的吉祥物“冰墩墩”,发现“冰墩墩”向前匀速直线运动,碰到空间站的舱壁后反弹回来如图甲所示,王亚平还做了下面有趣的实验,将一个普通的乒乓球按压进入水中,松手后发现乒乓球静止在按压位置如图乙所示。
在结束为期6个月的飞行任务后,航天员于2022年4月16日成功返回地面,此次返回是我国首次采用“快速返回技术”,其离地面10km后降落过程简化如下:返回舱在距离地面高度10km处,打开引导伞、减速伞、主伞,返回舱减速降落,在离地面1m左右时启动反推发动机,减速到2m/s左右的速度时抵达地面。

(1)航天员在空间站的惯性
(2)乒乓球没有上浮的原因是
A.乒乓球受到的浮力与重力二力平衡
B.乒乓球上下表面受到液体压力差为零
(3)为了健身,航天员进行下面哪种方式的运动最合理
A.跳远
B.跑步
C.引体向上
D.拉弹簧拉力器
(4)返回舱返回地面需要考虑大气气流、温度、压力等因素的影响,中国科学家因此制造了一个和返回舱相似的飞行器,模拟返回舱返回地面的情况,这是运用
(5)从打开引导伞、减速伞、主伞到落到地面的过程中,宇航员的动能
神奇的二极管
二极管是一种重要的半导体电子元件,有着广泛的应用,2014年诺贝尔物理学奖被颁发给在蓝色发光二极管上做出巨大贡献的科学家。符号“
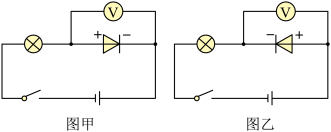
 ”,具有特殊的导电性,当电流从“+”极流进二极管时,二极管导通,相当于一根导线;而电流从“-”极流入时,二极管断路,实际上不会有电流通过。发光二极管只是二极管中的一种,与白炽灯泡相比,发光二极管具有节能、环保、安全、寿命长、低功耗、低热、高亮度、防水、微型、防震、易调光、光束集中、维护简便等优点,可以广泛应用于各种指示、显示、装饰、背光源、普通照明等领域。
”,具有特殊的导电性,当电流从“+”极流进二极管时,二极管导通,相当于一根导线;而电流从“-”极流入时,二极管断路,实际上不会有电流通过。发光二极管只是二极管中的一种,与白炽灯泡相比,发光二极管具有节能、环保、安全、寿命长、低功耗、低热、高亮度、防水、微型、防震、易调光、光束集中、维护简便等优点,可以广泛应用于各种指示、显示、装饰、背光源、普通照明等领域。(1)二极管具有
(2)为了探究二极管的特殊导电性,连接了图甲、图乙两个电路,闭合开关S,灯泡能够发光的是
(3)二极管的特殊导电性源自于构成材料P型半导体和N型半导体组成的晶片,受此启发,科研人员利用P型半导体元件和N型半导体元件串联,接上直流电源后,半导体材料的两端会产生温度差(珀尔帖效应),制成了电脑的散热器。如图所示,二对PN型半导体对是

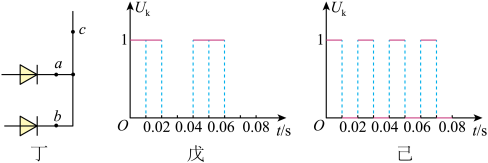
(4)理想型开关二极管输出信号值Uk=1时,电路通路;输出信号值Uk=0时,电路断路。如图丁所示,将两个理想型开关二极管接在某电路中,a、b两点信号值随时间的变化关系如图戊、己所示,则“0.03~0.04s”内电路c处是
“奋斗者”号
深遂的海底世界充满了神秘与未知,驱动着人类孜孜不倦地探索。2012年6月24日,“蛟龙”号载人深潜器下潜7020米新纪录诞生。在此后的八年时间中,我国科研团队攻坚克难,不断探索,终于在2020年11月10日,“奋斗者”号载人深潜器(如图所示)成功下潜10909m,刷新了我国载人深潜的新纪录。

某次执行任务时,在“奋斗者”号的外部挂好2t的压载铁,注水下潜,当下潜至预定深度时,“奋斗者”号通过适时抛掉0.8t的压载铁实现悬停。当完成工作后,潜航员再抛掉剩余的压载铁,实现上浮。可见,无论是下潜、悬停、还是上浮,压载铁的作用都是巨大的。
目前,中国成为世界上万米下潜次数和人数最多的国家。“奋斗者”号为我国探索海洋科学奥秘,保护和合理利用海洋资源提供了强大支撑。让我们保持奋斗的状态,继续向深海进发!
(已知铁的密度
 ,海水的密度
,海水的密度 ,
, 。)
。)请根据上述材料回答下列问题:
(1)“奋斗者”号的载人舱设计为球形结构,其目的是
(2)“奋斗者”号采用密度较小的钛合金新材料和新型固体浮力材料,其目的是
A.增大浮力 B.减小重力 C.更加抗压
(3)请你利用公式分析说明“奋斗者”号在执行该次任务时,实现上浮的原因
超市电动搬运车
如图甲是超市常用的一种电动拖盘搬运车,用于卖场和库房间的运输,被称作“地牛”, 其相关参数如表所示。其中驱动工作原理示意图如图乙,开关 S1和 S2由绝缘操纵杆控制,能同时接“1”或接“2”,向前推操纵杆时“地牛”前进且能调速,向后拉操纵杆时“地牛” 以恒定速度后退。下表是其相关参数,提升电动机工作,将货物提升到指定高度。所有电路由蓄电池组供电,都为蓄电池电压。电机效率是指电动机获得的有用机械能与消耗电能的比值。(g 取 10N/kg)

| 型号 | 自重 | 最大载货量 | 蓄电池电压 | 蓄电池容量 | 提升电机额定电压/额定功率 | 进退电机额定电压/额定功率 | 电机效率 |
| PTE20X | 0.4t | 2t | 36V | 100Ah | 36V/800W | 36V/900W | 80% |
(2)下列关于对搬运车的蓄电池的说法正确的是
A.蓄电池充足电一次,消耗的电能约 3.6×105J B.蓄电池组充电时,电能转化为化学能
C.蓄电池放电的过程中,蓄电池相当于用电器 D.蓄电池组是由若干节蓄电池并联组成的
(3)利用搬运车将 1×103kg 的货物放至货架,货物向上匀速竖直提升 15s,则消耗的电能为
(4)搬运车上有显示所载货物质量的仪表,其电路如图丙所示,电路电源电压为18V,电流表(0~0.6A),滑动变阻器 R4(100Ω 1A),压敏电阻R3的阻值与所受压力F的关系如图丁所示,由电流表改装的“质量表”显示盘上的刻度在最
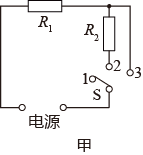
(5)电动机长时间连续工作会过热而烧坏电机,人们设计了如图所示的保护电路,R1是滑动变阻器,R2是热敏电阻,其阻值随温度升高而减小。当 R1两端电压U1增大到一定值时,控制电路将切断工作电路让电机停止工作实现对电机温度的控制。电源电压设定为10V,接入电路的阻值为 6Ω时,R2 的电功率为4W,此时工作电路恰好被切断。若预设的电机温度相对较低,则控制电压U1是

智能防疫机器人
我国研制的某款智能防疫机器人,具有自主测温、移动、避障等功能。
机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上,通过处理系统转变为热图像,实现对人群的体温检测。当发现超温人员,系统会自动语音播报,并在显示屏上用红色框标注入的脸部。
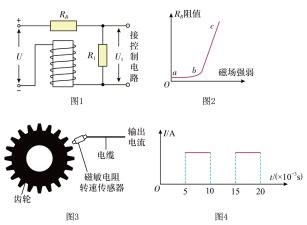
机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,如图1所示为控制电机运转的原理电路,U为输入电压,R1为定值电阻,RB为磁敏电阻,阻值随外加磁场强弱的变化而改变。
机器人为有效避障,在移动过程中会通过传感器发射、接收超声波或激光来侦测障碍物信息。当感知到前方障碍物时,机器人依靠减速器进行减速,并重新规划行驶路线。超声波传感器一般作用距离较短,它的成本低、实现方法简单、技术成熟。激光雷达的测量距离可以达到几十米甚至上百米,角度分辨率高,通常可以达到零点几度,测距的精度也高。但测量距离的置信度会反比于接收信号幅度的平方,因此,黑体或者远距离的物体距离测量不会像光亮的、近距离的物体那么好的估计。并且,对于透明材料,比如玻璃,激光雷达就无能为力了。
如表为机器人的部分参数,“电池比能量”为单位质量的电池所能输出的电能;“减速器的减速比”为输入转速与输出转速的比值。
| 电池的质量 | 10kg | 减速器的减速比 | 30:1 |
| 电池比能量 |  | 驱动电机的输入总功率 | 400W |
| 移动速度 | 0.1~1m/s | 驱动电机将电能转化为机械能的效率 | 60% |
(1)机器人在行进过程中遇到玻璃等透明障碍物时,利用
(2)若机器人以最大速度沿水平路面匀速直线运动7min,此过程中机器人受到的阻力为
(3)控制电机运转的磁敏电阻阻值随磁场强弱变化的图线如图2所示,当磁敏电阻在正常工作区时,即使图甲电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动,则磁敏电阻的正常工作区对应图中
(4)如图3所示是机器人测速系统的部分装置简化图,磁敏电阻转速传感器安装在驱动电机旋转齿轮的外侧,当传感器对准齿轮两齿间隙时,电缆输出电流为0。某次当驱动电机的齿轮匀速转动时,电缆输出如图4所示周期性变化的电流,则1s内对准传感器的齿间隙共有


