2021年辽宁省鞍山市铁西区中考一模物理试题
辽宁
九年级
一模
2024-02-21
150次
整体难度:
容易
考查范围:
声学、力学、热学、电磁学、光学
一、单选题 添加题型下试题

| A.从电视中传来主持人朗读的声音不是由振动产生的 |
| B.人们能够分辨出每位主持人朗读的声音,是因为他们发声的音色不同 |
| C.调节电视机的音量,是为了改变声音的音调 |
D.利用电视看晚会,声音在空气中的传播速度是3 108m/s 108m/s |
| A.气温骤降时,果农给没有成熟的橘子喷水,利用水的凝固吸热,防止橘子冻伤 |
| B.炎热的夏天,在地上洒水可以降低室内气温,利用水的液化吸热,带走空气的热量 |
| C.汽车装有水箱作为散热器帮助汽缸降温,利用水的比热容较大,可以吸收较多的热量 |
| D.寒冷地区,岩石裂隙中的水结冰后会使岩石崩裂,由于水结冰密度变大,体积膨胀 |

| A.鸡蛋在清水中沉底时,鸡蛋没有受到浮力 |
| B.鸡蛋上浮是因为向水中加盐使鸡蛋受到的重力减小 |
| C.鸡蛋上浮是因为向水中加盐使其受到的浮力大于受到的重力 |
| D.鸡蛋最终漂浮在水面上时,鸡蛋受到的盐水作用力大于鸡蛋受到的重力 |
【知识点】 物体沉浮状态与浮力、重力和体积的关系
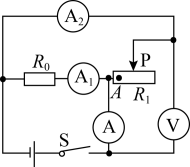
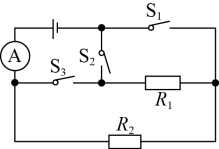
| A.电流表A示数变大,电流表A1示数变大 |
| B.电流表A1示数变小,电流表A2示数变小 |
| C.电压表V示数与电流表A1示数的乘积变大 |
| D.电压表V示数与电流表A2示数的比值变大 |
【知识点】 含有变阻器电路的动态分析
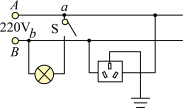
| A.导线B与大地之间的电压为220 V |
| B.测电笔先后插入插座的左右插孔,氖管都发光 |
| C.电冰箱的插头插入三孔插座能使电冰箱的金属外壳接地 |
| D.断开开关S后,站在地上的人接触a点或b点一定不会触电 |
【知识点】 火线和零线 练习使用测电笔 三线插头的接线及作用 可能发生触电事故的情况解读
| A.核电站利用核能发电,核能是新能源 |
| B.挂衣钩的吸盘能吸附在墙上,是因为分子间存在引力 |
| C.指南针能够指南北是因为地球周围存在磁场 |
| D.电磁继电器是通过控制低压电路的通断间接控制高压工作电路通断的 |
二、多选题 添加题型下试题
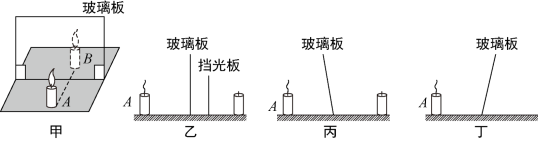
| A.若蜡烛A距玻璃板4cm,则蜡烛B距玻璃板8cm才能与蜡烛A的像完全重合 |
| B.如图乙所示,若在玻璃板与蜡烛B之间放一块挡光板,则仍能通过玻璃板观察到A的像 |
| C.若实验时装置如图丙所示,则蜡烛A在玻璃板中的像偏高且倾斜 |
| D.若实验时装置如图丁所示,则蜡烛A不能在玻璃板中成像 |
【知识点】 平面镜成像的特点和规律

| A.当它静止在地面上时,地面对它的支持力和它对地面的压力是一对相互作用力 |
| B.脚闸板上刻有花纹是为了增大脚与闸板之间的摩擦力 |
| C.电动车刹车过程中轮胎温度升高,内能增大,是通过做功改变的 |
| D.刹车后,电动车仍要向前滑动一段距离才停下来,是因为受到惯性的作用 |
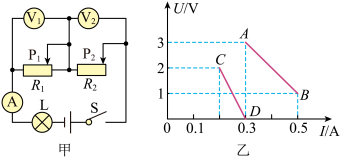
| A.图乙中CD表示的是电压表V1的示数与电流表示数变化关系图像 |
| B.滑动变阻器R2的最大阻值为20Ω |
| C.小灯泡的额定功率为2.5W |
| D.整个过程中电路消耗的最大功率与最小功率之比为5∶1 |
三、填空题 添加题型下试题
【知识点】 力可以改变物体的运动状态 半导体的概念 漫反射
【知识点】 扩散现象 水的比热容特点及应用解读 汽油机的构造与工作过程解读 分子的热运动
【知识点】 液体压强的特点及其应用 大气压的应用解读
【知识点】 力做功的必要因素解读 辨析物体的机械能是否发生变化
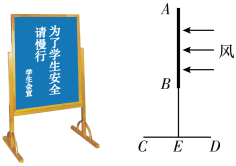
【知识点】 杠杆的分类解读 生活中常见的杠杆模型 杠杆五要素及其判断
【知识点】 根据欧姆定律计算导体的电阻、电流及电压

四、计算题 添加题型下试题
(1)工人拉绳的力;
(2)工人匀速拉绳过程中对地面的压强;
(3)工人做功的功率;
(4)动滑轮的重力。
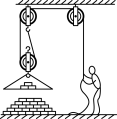
【知识点】 机械效率的简单计算 滑轮、滑轮组机械效率的计算
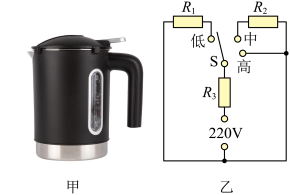
额定电压 | 220V |
高温挡功率 | 1100W |
中温挡功率 | 440W |
低温挡功率 | |
容量 | 1L |
(2)加热杯的低温挡功率是多少?
(3)若不计热量损失,加热杯使用高温挡加热,使1L水从12℃升高到100℃,需要多长时间?
五、实验题 添加题型下试题
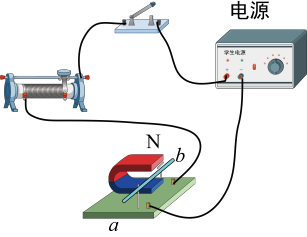
(1)该实验探究的问题是磁场对通电导体的作用力方向与
(2)若闭合开关后,导体 ab 不动,请猜想导体 ab 不动原因可能是
【知识点】 影响磁场对通电导线作用力大小和方向的因素
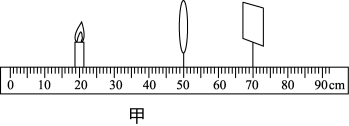
(2)若保持蜡烛和光屏的位置不变,小明只需要将凸透镜移至
(3)小明拿来一副眼镜放在蜡烛和凸透镜之间,且较靠近凸透镜,发现光屏上原来清晰的像变模糊了,他只将光屏向远离凸透镜的方向移动适当距离时,又在光屏上观察到蜡烛清晰的像。戴这种眼镜的人是
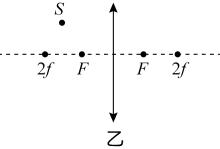
(4)请你在图乙中画出点光源S通过凸透镜所成的像的位置A′
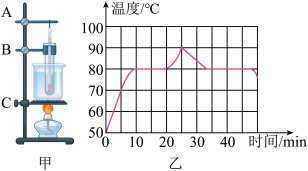
(1)安装图甲所示的器材时,应先确定
(2)分析图乙可知:该物质的凝固点为
【知识点】 探究固体熔化时温度的变化规律
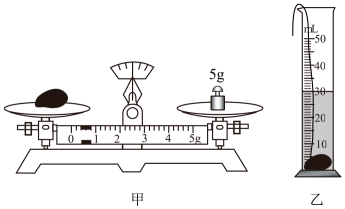
(2)小明测得一个蒜瓣的质量如图甲所示,质量为
(3)小明对实验进行评估,觉得蒜瓣太小,测得体积的误差较大,导致测得的密度不准。他设计了下列解决方案,其中合理的是
A.换量程更大的量筒测量
B.测多个蒜瓣的总质量和总体积
C.换分度值更大的量筒测量
【知识点】 直接测量固体的密度解读 测量固体密度的实验器材和实验步骤
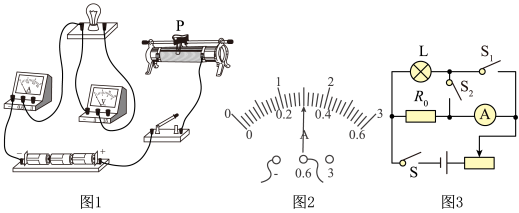
(1)测量额定电压为2.5V小灯泡正常发光时的电阻实验:
①请你用笔画线代替导线,将图1所示的电路连接完整;
②闭合开关,移动滑片P,使电压表示数为2.5V,此时电流表示数如图2所示,则小灯泡正常发光时电阻为
③在探究过程中,由于操作有误,在未断开开关的情况下,直接将小灯泡从灯座上拔出,那么拔出小灯泡后电压表的示数
(2)小组同学在没有电压表的情况下,利用电流表和定值电阻,设计了如图3所示的实验电路,测量小灯泡的额定功率。已知小灯泡的额定电压为U额,定值电阻的阻值为R0,实验步骤如下:
①闭合开关S、S1,断开S2,调节滑动变阻器,使电流表示数为
②
③测得小灯泡的额定电功率P额=
六、综合题 添加题型下试题
(1)机器人为有效避障,在移动过程中会发射、接收超声波(或激光)来侦测障碍物信息。当机器人在行进过程中遇到玻璃等透明障碍物时,它是利用
(2)下列关于机器人的说法中,正确的是
A.菲涅尔透镜的作用相当于凹透镜
B.菲涅尔透镜接收的是人体辐射出的红外线,但不属于电磁波家族
C.图乙中电磁铁的上端为S极
D.机器人发现体温38℃的人会语音报警并识别
(3)机器人是利用电动机来驱动的,驱动电机的输入总功率为400W,将电能转化为机械能的效率为60%,它的移动速度范围为0.1~1.0m/s。若机器人以最大速度沿水平路面匀速直线运动,则此过程中机器人受到的阻力为
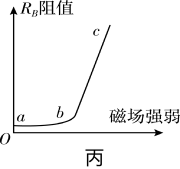
(4)控制驱动电机运转的磁敏电阻阻值随磁场强弱变化的图像如图丙所示,当它在正常工作区时,即使图乙电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动。则磁敏电阻的正常工作区对应图中


试卷分析
导出试卷题型(共 25题)
试卷难度
知识点分析
细目表分析
| 题号 | 难度系数 | 详细知识点 | 备注 |
| 一、单选题 | |||
| 1 | 0.85 | 声音的产生 熟悉声音在一些介质中传播的速度 音色 区分音调、响度与音色 | |
| 2 | 0.65 | 与密度有关的物理现象 熔化和凝固的应用 蒸发致冷的应用 水的比热容特点及应用 | |
| 3 | 0.65 | 物体沉浮状态与浮力、重力和体积的关系 | |
| 4 | 0.65 | 含有变阻器电路的动态分析 | |
| 5 | 0.65 | 火线和零线 练习使用测电笔 三线插头的接线及作用 可能发生触电事故的情况 | |
| 6 | 0.65 | 大气压的应用 指南针的工作原理 电磁继电器的结构、原理与工作示意图 核能 | |
| 二、多选题 | |||
| 7 | 0.65 | 平面镜成像的特点和规律 | |
| 8 | 0.65 | 增大摩擦的方法及生活中的实例 生活中的惯性现象 平衡力与相互作用力的区别 做功改变物体的内能 | |
| 9 | 0.4 | 欧姆定律的简单计算 电功率P=UI及推导式的简单计算 动态电路中电功率的简单计算 动态电路中电功率的范围问题 | |
| 三、填空题 | |||
| 10 | 0.94 | 力可以改变物体的运动状态 半导体的概念 漫反射 | |
| 11 | 0.65 | 扩散现象 水的比热容特点及应用 汽油机的构造与工作过程 分子的热运动 | |
| 12 | 0.85 | 摩擦起电现象 汽化的概念和现象 | |
| 13 | 0.85 | 液体压强的特点及其应用 大气压的应用 | |
| 14 | 0.94 | 力做功的必要因素 辨析物体的机械能是否发生变化 | |
| 15 | 0.85 | 杠杆的分类 生活中常见的杠杆模型 杠杆五要素及其判断 | |
| 16 | 0.65 | 根据欧姆定律计算导体的电阻、电流及电压 | |
| 17 | 0.65 | 辨析电路的串并联 电功率的计算式P=UI及推导式的应用 焦耳定律的公式及简单应用 | |
| 四、计算题 | |||
| 18 | 0.4 | 机械效率的简单计算 滑轮、滑轮组机械效率的计算 | |
| 19 | 0.65 | 电功率的定义式P=W/t的应用 电功率的计算式P=UI及推导式的应用 开关控制的多状态电路的功率计算 计算物体温度变化时的吸放热 | |
| 五、实验题 | |||
| 20 | 0.85 | 影响磁场对通电导线作用力大小和方向的因素 | |
| 21 | 0.65 | 凸透镜的特殊光线作图 探究凸透镜成像规律的实验注意事项和错误分析 探究凸透镜成像规律的实验结论 近视眼和远视眼的矫正方法及光路图 | |
| 22 | 0.85 | 探究固体熔化时温度的变化规律 | |
| 23 | 0.65 | 直接测量固体的密度 测量固体密度的实验器材和实验步骤 | |
| 24 | 0.65 | 伏安法测电阻的实验原理和电路图 伏安法测电阻的实验步骤和数据处理 伏安法测电阻实验中的注意事项和故障分析 用电流表和已知阻值电阻测灯泡的电功率 | |
| 六、综合题 | |||
| 25 | 0.65 | 判断螺线管极性、电流方向、绕线方式的关系 扬声器和耳机的构造及原理 超声波的利用 不同参照物下描述运动 | |


