名校
1 . 如图所示,静止于光滑水平面上的 光滑圆槽A和小球B,两者质量相等,现使圆槽A以
光滑圆槽A和小球B,两者质量相等,现使圆槽A以 的速度向右运动,槽底端与水平面相切,圆槽半径为
的速度向右运动,槽底端与水平面相切,圆槽半径为 ,重力加速度为
,重力加速度为 。求
。求
(1)小球上升的最大高度;
(2)小球获得的最大速度。

光滑圆槽A和小球B,两者质量相等,现使圆槽A以的速度向右运动,槽底端与水平面相切,圆槽半径为,重力加速度为。求(1)小球上升的最大高度;
(2)小球获得的最大速度。
您最近一年使用:0次
名校
2 . 如图所示,竖直平面内的四分之一圆弧轨道下端与水平桌面相切,小滑块A和B分别静止在圆弧轨道的最高点和最低点。现将A无初速释放,A与B碰撞后结合为一个整体,并沿桌面滑动.已知圆弧轨道光滑,半径 ;A和B的质量均为
;A和B的质量均为 ,A和B整体与桌面之间的动摩擦因数
,A和B整体与桌面之间的动摩擦因数 。取重力加速度
。取重力加速度 。求:
。求:
(1)与B碰撞前瞬间A对轨道的压力 的大小;
的大小;
(2)碰后瞬间速度多大?
(3)碰撞过程中A对B的冲量 的大小。
的大小。

;A和B的质量均为,A和B整体与桌面之间的动摩擦因数。取重力加速度。求:(1)与B碰撞前瞬间A对轨道的压力
的大小;(2)碰后瞬间速度多大?
(3)碰撞过程中A对B的冲量
的大小。
您最近一年使用:0次
2024-02-23更新
|
532次组卷
|
2卷引用:江苏省响水中学2023-2024学年高二上学期期末考试物理试题
3 . 如图所示,质量为2m的均质凹槽放在光滑的水平地面上,凹槽内有一半径为R的半圆形光滑轨道,圆心为O,左右端点与O等高。质量为m的小球,从右端点由静止释放。已知重力加速度为g,运动过程中凹槽不翻转。
(1)若凹槽固定,求小球到达轨道最低点时速度v。
(2)若凹槽不固定,求小球从释放至第一次运动到轨道最低点过程中凹槽移动的距离x。
(3)若凹槽不固定,求小球运动到和O的连线与水平方向成 角时的动能
角时的动能 。
。

(1)若凹槽固定,求小球到达轨道最低点时速度v。
(2)若凹槽不固定,求小球从释放至第一次运动到轨道最低点过程中凹槽移动的距离x。
(3)若凹槽不固定,求小球运动到和O的连线与水平方向成
角时的动能。
您最近一年使用:0次
4 . 如图所示,一圆心为O、半径为R的光滑半圆弧轨道固定在竖直平面内,其下端与光滑水平面在Q点相切。在水平面上,质量为m的小物块A以初速度v0向质量也为m的静止物块B运动。A、B发生正碰后,B恰好能到达半圆弧轨道的最高点,A沿半圆弧轨道运动到与O点等高的C点时速度为零。已知重力加速度大小为g,忽略空气阻力。求:
(1)A、B发生正碰后的瞬间,A和B的速度分别为多少;
(2)碰撞前A的初速度v0的大小;
(3)A、B发生的碰撞是弹性碰撞吗?如果是,请说明理由;若不是,则碰撞过程中A和B损失的总动能为多少?

(1)A、B发生正碰后的瞬间,A和B的速度分别为多少;
(2)碰撞前A的初速度v0的大小;
(3)A、B发生的碰撞是弹性碰撞吗?如果是,请说明理由;若不是,则碰撞过程中A和B损失的总动能为多少?
您最近一年使用:0次
名校
5 . 如图所示,小球从斜面上 高处由静止释放,经水平面进入竖直光滑圆轨道,恰好能经过圆轨道的最高点,
高处由静止释放,经水平面进入竖直光滑圆轨道,恰好能经过圆轨道的最高点, 为圆轨道的圆心,P为圆轨道上与圆心等高的点,已知小球的质量,
为圆轨道的圆心,P为圆轨道上与圆心等高的点,已知小球的质量, ,圆轨道半径
,圆轨道半径 ,取重力加速度
,取重力加速度
(1)求小球在进入圆轨道前的过程中克服阻力做的功W;
(2)求小球经过P点时的加速度大小 ;
;
(3)将上方圆轨道沿水平方向截去一段,过轨道M、N端点的半径与竖直方向的夹角为θ,小球仍从斜面上高处由静止释放,要使小球落在圆轨道内侧,求θ的范围.
高处由静止释放,经水平面进入竖直光滑圆轨道,恰好能经过圆轨道的最高点,为圆轨道的圆心,P为圆轨道上与圆心等高的点,已知小球的质量,,圆轨道半径,取重力加速度(1)求小球在进入圆轨道前的过程中克服阻力做的功W;
(2)求小球经过P点时的加速度大小
;(3)将
上方圆轨道沿水平方向截去一段,过轨道M、N端点的半径与竖直方向的夹角为θ,小球仍从斜面上高处由静止释放,要使小球落在圆轨道内侧,求θ的范围.
您最近一年使用:0次
名校
6 . 如图所示,轨道 由三部分组成,即:半径
由三部分组成,即:半径 的光滑圆弧轨道
的光滑圆弧轨道 ,长度
,长度 的粗糙水平轨道
的粗糙水平轨道 ,以及足够长的光滑水平轨道
,以及足够长的光滑水平轨道 。物块
。物块 质量
质量 、物块
、物块 质量
质量 压缩着一轻质弹簧并锁定(物块与弹簧不连接)静止于段中间,物块、可视为质点。紧靠
压缩着一轻质弹簧并锁定(物块与弹簧不连接)静止于段中间,物块、可视为质点。紧靠 的右侧水平地面上停放着质量
的右侧水平地面上停放着质量 的小车,其上表面
的小车,其上表面 段粗糙,与等高,长度
段粗糙,与等高,长度 ;
; 段为半径
段为半径 的光滑圆弧轨道;小车与地面的阻力可不计。、与,间的滑动摩擦因数均为
的光滑圆弧轨道;小车与地面的阻力可不计。、与,间的滑动摩擦因数均为 ,现解除弹簧锁定,物块、由静止被弹出(、脱离弹簧后立即撤走弹簧),其中物块进入
,现解除弹簧锁定,物块、由静止被弹出(、脱离弹簧后立即撤走弹簧),其中物块进入 轨道,而物块滑上小车。不计物块经过各连接点时的机械能损失。重力加速度大小取
轨道,而物块滑上小车。不计物块经过各连接点时的机械能损失。重力加速度大小取
(1)若物块经过 后恰好能到达A点,求通过
后恰好能到达A点,求通过 点时,P对圆弧轨道的压力;
点时,P对圆弧轨道的压力;
(2)若物块经过后恰好能到达A点,求被锁定弹簧的最大弹性势能。;
(3)若物块经过后恰好能到达A点,请分析物块 能否冲出小车最高点
能否冲出小车最高点 。
。

由三部分组成,即:半径的光滑圆弧轨道,长度的粗糙水平轨道,以及足够长的光滑水平轨道。物块质量、物块质量压缩着一轻质弹簧并锁定(物块与弹簧不连接)静止于段中间,物块、可视为质点。紧靠的右侧水平地面上停放着质量的小车,其上表面段粗糙,与等高,长度;段为半径的光滑圆弧轨道;小车与地面的阻力可不计。、与,间的滑动摩擦因数均为,现解除弹簧锁定,物块、由静止被弹出(、脱离弹簧后立即撤走弹簧),其中物块进入轨道,而物块滑上小车。不计物块经过各连接点时的机械能损失。重力加速度大小取(1)若物块
经过后恰好能到达A点,求通过点时,P对圆弧轨道的压力;(2)若物块
经过后恰好能到达A点,求被锁定弹簧的最大弹性势能。;(3)若物块
经过后恰好能到达A点,请分析物块能否冲出小车最高点。
您最近一年使用:0次
2023-12-16更新
|
758次组卷
|
2卷引用:江苏省苏州市南京航空航天大学苏州附属中学2023-2024学年高二上学期12月阳光测试物理试题
7 . 如图所示,在光滑水平面上通过锁定装置固定一辆质量M=2kg的小车,小车左边部分为半径R=1.8m的四分之一光滑圆弧轨道,轨道末端平滑连接一长度L=3m的水平粗糙面,粗糙面右端是一挡板。有一个质量为m=1kg的小物块(可视为质点)从小车左侧圆弧轨道顶端A点静止释放,小物块和小车在粗糙区域的滑动摩擦因数μ=0.09,小物块与挡板的碰撞无机械能损失,重力加速度g=10m/s2。
(1)求小物块滑到圆弧轨道末端时速度大小;
(2)若解除小车锁定,让小物块由A点静止释放,求小物块运动到圆弧末端时,此时小物块对轨道的压力大小;
(3)在(2)问的初始条件下,小物块将与小车右端发生多次碰撞,求:小物块最终停止时到右侧挡板的距离。

(1)求小物块滑到圆弧轨道末端时速度大小;
(2)若解除小车锁定,让小物块由A点静止释放,求小物块运动到圆弧末端时,此时小物块对轨道的压力大小;
(3)在(2)问的初始条件下,小物块将与小车右端发生多次碰撞,求:小物块最终停止时到右侧挡板的距离。
您最近一年使用:0次
名校
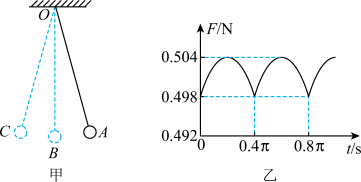
8 . 如图甲,将力传感器固定于天花板上,传感器上O点为单摆的固定悬点。现将摆球拉到A点,最大摆角未知。现释放摆球,摆球将在竖直面内的A、C之间来回摆动,其中B点为运动中的最低位置。图乙表示细线对摆球的拉力大小F随时间:变化的曲线,图中t=0为摆球从A点开始运动的时刻,g取 .求:
.求:
(1)单摆的周期和摆长;
(2)摆球的质量;
(3)摆球运动过程中的最大速度。
.求:(1)单摆的周期和摆长;
(2)摆球的质量;
(3)摆球运动过程中的最大速度。
您最近一年使用:0次
9 . 图甲是一种能自动计数的智能呼啦圈,简化模型如图乙。已知配重(可视为质点)质量 ,绳长为
,绳长为 ,悬挂点A到转轴
,悬挂点A到转轴 的距离
的距离 。水平固定好腰带,通过人体微小扭动,使配重从静止开始加速旋转,一段时间后配重在水平面内做匀速圆周运动。配重运动过程中腰带可视为不动,不计空气阻力。重力加速度,
。水平固定好腰带,通过人体微小扭动,使配重从静止开始加速旋转,一段时间后配重在水平面内做匀速圆周运动。配重运动过程中腰带可视为不动,不计空气阻力。重力加速度, ,
, 。
。
(1)当配重匀速转动且当绳子与竖直方向夹角 时,求配重的角速度;
时,求配重的角速度;
(2)配重从静止开始加速旋转到 的过程中,绳对配重做的功。
的过程中,绳对配重做的功。

,绳长为,悬挂点A到转轴的距离。水平固定好腰带,通过人体微小扭动,使配重从静止开始加速旋转,一段时间后配重在水平面内做匀速圆周运动。配重运动过程中腰带可视为不动,不计空气阻力。重力加速度,,。(1)当配重匀速转动且当绳子与竖直方向夹角
时,求配重的角速度;(2)配重从静止开始加速旋转到
的过程中,绳对配重做的功。
您最近一年使用:0次
10 . 如图甲,点为单摆的固定悬点,将力传感器接在摆球与点之间。现将摆球拉到A点,释放摆球,摆球将在竖直面内的A、C之间来回摆动,其中B点为运动中的最低位置。图乙表示细线对摆球的拉力大小 随时间
随时间 变化的曲线,图中
变化的曲线,图中 为摆球从A点开始运动的时刻,取
为摆球从A点开始运动的时刻,取 。求:(计算结果保留根号和π)
。求:(计算结果保留根号和π)
(1)单摆的摆长;
(2)摆球的质量及小球到达B点时速度大小;
(3)摆球在四分之一周期内从A运动到B过程中摆线对小球拉力的冲量大小。

点为单摆的固定悬点,将力传感器接在摆球与点之间。现将摆球拉到A点,释放摆球,摆球将在竖直面内的A、C之间来回摆动,其中B点为运动中的最低位置。图乙表示细线对摆球的拉力大小随时间变化的曲线,图中为摆球从A点开始运动的时刻,取。求:(计算结果保留根号和π)(1)单摆的摆长;
(2)摆球的质量及小球到达B点时速度大小;
(3)摆球在四分之一周期内从A运动到B过程中摆线对小球拉力的冲量大小。
您最近一年使用:0次


