已知 ,求:
,求:
(1) ;
;
(2) ;
;
(3) .
.
,求:(1)
;(2)
;(3)
.
21-22高二·全国·课后作业 查看更多[2]
人教B版(2019)选择性必修第一册课本习题1.1.3 空间向量的坐标与空间直角坐标系(已下线)第一章 空间向量与立体几何 1.1 空间向量及其运算 1.1.3 空间向量的坐标与空间直角坐标系
更新时间:2022-03-01 10:04:12
|
相似题推荐
解答题-问答题
|
适中
(0.65)
名校
【推荐1】如图,在平行六面体 中,以顶点
中,以顶点 为端点的三条边的长度都为1,且两两夹角为60°.求
为端点的三条边的长度都为1,且两两夹角为60°.求 与
与 所成角的余弦值.
所成角的余弦值.
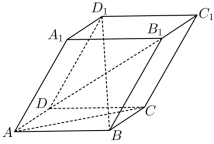
中,以顶点为端点的三条边的长度都为1,且两两夹角为60°.求与所成角的余弦值.
您最近一年使用:0次
解答题-问答题
|
适中
(0.65)
解题方法
【推荐2】如图1, 是平行四边形,
是平行四边形, ,
, .如图2,把平行四边形沿对角线AC折起,使
.如图2,把平行四边形沿对角线AC折起,使 与
与 成
成 角,
角,
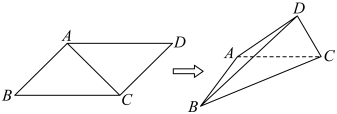
(1)求 的长;
的长;
(2)求异面直线 与
与 所成的角的余弦值.
所成的角的余弦值.
是平行四边形,,.如图2,把平行四边形沿对角线AC折起,使与成角, (1)求
的长;(2)求异面直线
与所成的角的余弦值.
您最近一年使用:0次
 ,
, 分别是
分别是 ,
, 上的点,且
上的点,且 ,
, .设
.设 ,
, ,
, .
.
 ;
; ,
, ,
, ,求
,求 的长.
的长.
解答题-问答题
|
适中
(0.65)
名校
【推荐1】《九章算术》中将四个面都为直角三角形的四面体称为鳖臑.如图,在鳖臑 中,
中, 平面
平面 ,
, 平面
平面 ,
, 为
为 的中点,
的中点, .
.
(1)设 ,
, ,
, ,用
,用 表示
表示 ;
;
(2)若 ,求
,求 .
.
中,平面,平面,为的中点,. (1)设
,,,用表示;(2)若
,求.
您最近一年使用:0次
解答题-问答题
|
适中
(0.65)
【推荐2】如图所示,空间四边形 中,
中, ,
, 分别是
分别是 ,
, 的重心,设
的重心,设 ,
, ,
, ,为的中点.试用向量
,为的中点.试用向量 ,
, ,
, 表示向量
表示向量 和
和 .
.
中,,分别是,的重心,设,,,为的中点.试用向量,,表示向量和.
您最近一年使用:0次
解答题-问答题
|
适中
(0.65)
【推荐3】假设在一个以米为单位的空间直角坐标系 中,平面
中,平面 内有一跟踪和控制飞行机器人
内有一跟踪和控制飞行机器人 的控制台,的位置为
的控制台,的位置为 .上午10时07分测得飞行机器人在
.上午10时07分测得飞行机器人在 处,并对飞行机器人发出指令:以速度
处,并对飞行机器人发出指令:以速度 米/秒沿单位向量
米/秒沿单位向量 作匀速直线飞行(飞行中无障碍物),10秒后到达
作匀速直线飞行(飞行中无障碍物),10秒后到达 点,再发出指令让机器人在点原地盘旋
点,再发出指令让机器人在点原地盘旋 秒,在原地盘旋过程中逐步减速并降速到
秒,在原地盘旋过程中逐步减速并降速到 米/秒,然后保持米/秒,再沿单位向量
米/秒,然后保持米/秒,再沿单位向量 作匀速直线飞行(飞行中无障碍物),当飞行机器人最终落在平面内发出指令让它停止运动.机器人近似看成一个点.
作匀速直线飞行(飞行中无障碍物),当飞行机器人最终落在平面内发出指令让它停止运动.机器人近似看成一个点. 点开始出发20秒后飞行机器人的位置;
点开始出发20秒后飞行机器人的位置;
(2)求在整个飞行过程中飞行机器人与控制台的最近距离(精确到米).
中,平面内有一跟踪和控制飞行机器人的控制台,的位置为.上午10时07分测得飞行机器人在处,并对飞行机器人发出指令:以速度米/秒沿单位向量作匀速直线飞行(飞行中无障碍物),10秒后到达点,再发出指令让机器人在点原地盘旋秒,在原地盘旋过程中逐步减速并降速到米/秒,然后保持米/秒,再沿单位向量作匀速直线飞行(飞行中无障碍物),当飞行机器人最终落在平面内发出指令让它停止运动.机器人近似看成一个点.
点开始出发20秒后飞行机器人的位置;(2)求在整个飞行过程中飞行机器人
与控制台的最近距离(精确到米).
您最近一年使用:0次
解答题-问答题
|
适中
(0.65)
名校
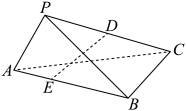
【推荐1】如图,四棱锥 的各棱长都为
的各棱长都为 .
.
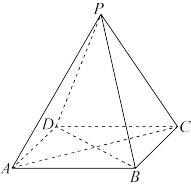
(1)用向量法证明 ;
;
(2)求 的值.
的值.
的各棱长都为.(1)用向量法证明
;(2)求
的值.
您最近一年使用:0次
解答题-问答题
|
适中
(0.65)
名校
【推荐2】设全体空间向量组成的集合为 ,
, 为V中的一个单位向量,建立一个“自变量”为向量,“因变量”也是向量的“向量函数”
为V中的一个单位向量,建立一个“自变量”为向量,“因变量”也是向量的“向量函数” ;
; .
.
(1)设 ,
, ,若
,若 ,求向量
,求向量 ;
;
(2)对于V中的任意单位向量 ,求
,求 的最大值.
的最大值.
,为V中的一个单位向量,建立一个“自变量”为向量,“因变量”也是向量的“向量函数”;.(1)设
,,若,求向量;(2)对于V中的任意单位向量
,求的最大值.
您最近一年使用:0次
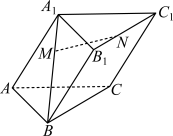
 分别是
分别是 的中点,设
的中点,设 为空间向量的一组基底,计算:
为空间向量的一组基底,计算:
 ;
; .
.
解答题-问答题
|
适中
(0.65)
【推荐1】已知O为坐标原点,A,B,C三点的坐标分别是(2,-1,2),(4,5,-1),(-2,2,3),求适合下列条件的点P的坐标:
(1) (
( -
- );
);
(2) (-).
(-).
(1)
(-);(2)
(-).
您最近一年使用:0次
解答题-问答题
|
适中
(0.65)
解题方法
【推荐2】如图,直三棱柱 ,底面中,
,底面中, ,
, ,棱
,棱 ,
, 分别是
分别是 的中点.
的中点.
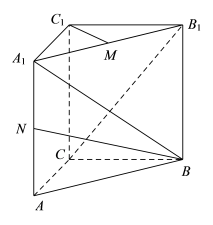
(1) 求 的值;
的值;
(2) 求直线 与平面
与平面 所成的角的正弦值.
所成的角的正弦值.
,底面中,,,棱,分别是的中点.(1) 求
的值;(2) 求直线
与平面所成的角的正弦值.
您最近一年使用:0次
 为
为 的中点.
的中点.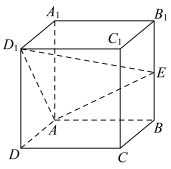
 的长;
的长; 与
与 所成的角的余弦值;
所成的角的余弦值; 所成的角的正弦值.
所成的角的正弦值.


