名校
1 . 在三棱锥 中,
中, 平面
平面 ,
, ,平面内动点
,平面内动点 的轨迹是集合
的轨迹是集合 .已知
.已知 ,
, 且
且 在棱
在棱 所在直线上,
所在直线上, ,2,则下列说法不正确的是( )
,2,则下列说法不正确的是( )
中,平面,,平面内动点的轨迹是集合.已知,且在棱所在直线上,,2,则下列说法不正确的是( )| A.动点的轨迹是圆 |
B.平面 平面 平面 |
| C.三棱锥体积的最大值为3 |
D.三棱锥 外接球的半径不是定值 外接球的半径不是定值 |
您最近半年使用:0次
名校
2 . 已知复数 满足
满足 ,复数
,复数 满足
满足 ,则复数对应复平面上的点构成区域的面积是
,则复数对应复平面上的点构成区域的面积是__________ .
满足,复数满足,则复数对应复平面上的点构成区域的面积是
您最近半年使用:0次
3 . 已知直线 与直线
与直线 相交于点
相交于点 ,且点到点
,且点到点 的距离等于1,则实数
的距离等于1,则实数 的取值范围是( )
的取值范围是( )
与直线相交于点,且点到点的距离等于1,则实数的取值范围是( )A. |
B. |
C. |
D. |
您最近半年使用:0次
2024-04-23更新
|
608次组卷
|
2卷引用:上海市实验学校2023-2024学年高二下学期4月月考数学试卷
名校
解题方法
4 . 已知点 、
、 ,直线
,直线 :
: 与
与 :
: 交于点M,则
交于点M,则 的最大值为
的最大值为______ .
、,直线:与:交于点M,则的最大值为
您最近半年使用:0次
2024·广东·模拟预测
名校
5 . 已知圆 ,圆
,圆 ,直线
,直线 上存在点,过点向圆
上存在点,过点向圆 引两条切线
引两条切线 和
和 ,切点是和,再过点向圆
,切点是和,再过点向圆 引两条切线
引两条切线 和
和 ,切点是
,切点是 和
和 ,若
,若 ,则实数
,则实数 的取值范围为
的取值范围为_________ .
,圆,直线上存在点,过点向圆引两条切线和,切点是和,再过点向圆引两条切线和,切点是和,若,则实数的取值范围为
您最近半年使用:0次
名校
6 . 已知过原点的动直线 与圆
与圆 相交于不同的两点
相交于不同的两点 ,线段的中点
,线段的中点 的轨迹记为曲线
的轨迹记为曲线 ,若经过点
,若经过点 的直线
的直线 与曲线只有一个交点,则直线的倾斜角的取值范围是
与曲线只有一个交点,则直线的倾斜角的取值范围是______ .
与圆相交于不同的两点,线段的中点的轨迹记为曲线,若经过点的直线与曲线只有一个交点,则直线的倾斜角的取值范围是
您最近半年使用:0次
名校
7 . 某校兴趣小组在如图所示的矩形区域ABCD内举行机器人拦截挑战赛,在E处按 方向释放机器人甲,同时在A处按某方向释放机器人乙,设机器人乙在Q处成功拦截机器人甲.若点Q在矩形区域ABCD内(包含边界),则挑战成功,否则挑战失败.
方向释放机器人甲,同时在A处按某方向释放机器人乙,设机器人乙在Q处成功拦截机器人甲.若点Q在矩形区域ABCD内(包含边界),则挑战成功,否则挑战失败.
已知 米,E为AB中点,机器人乙的速度是机器人甲的速度的2倍,比赛中两机器人均按匀速直线运动方式行进,记与
米,E为AB中点,机器人乙的速度是机器人甲的速度的2倍,比赛中两机器人均按匀速直线运动方式行进,记与 的夹角为
的夹角为 .
.
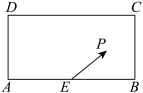
(1)若 ,AD足够长,则如何设置机器人乙的释放角度才能挑战成功?(结果精确到
,AD足够长,则如何设置机器人乙的释放角度才能挑战成功?(结果精确到 )
)
(2)如何设计矩形区域ABCD的宽AD的长度,才能确保无论的值为多少,总可以通过设置机器人乙的释放角度使机器人乙在矩形区域ABCD内成功拦截机器人甲?
方向释放机器人甲,同时在A处按某方向释放机器人乙,设机器人乙在Q处成功拦截机器人甲.若点Q在矩形区域ABCD内(包含边界),则挑战成功,否则挑战失败.已知
米,E为AB中点,机器人乙的速度是机器人甲的速度的2倍,比赛中两机器人均按匀速直线运动方式行进,记与的夹角为.(1)若
,AD足够长,则如何设置机器人乙的释放角度才能挑战成功?(结果精确到)(2)如何设计矩形区域ABCD的宽AD的长度,才能确保无论
的值为多少,总可以通过设置机器人乙的释放角度使机器人乙在矩形区域ABCD内成功拦截机器人甲?
您最近半年使用:0次
8 . 已知动点到点 的距离是到点
的距离是到点 的距离的2倍,则动点的轨迹所围成图形的面积为
的距离的2倍,则动点的轨迹所围成图形的面积为______ .
到点的距离是到点的距离的2倍,则动点的轨迹所围成图形的面积为
您最近半年使用:0次
9 . 已知在平面直角坐标系xOy中, ,动点P满足
,动点P满足
 则P点的轨迹Γ为圆
则P点的轨迹Γ为圆_______ ,过点A的直线交圆Γ于两点C,D,且 ,则
,则
______ .
,动点P满足则P点的轨迹Γ为圆,则
您最近半年使用:0次
名校
10 . 已知两点 ,
, ,动点P到点A的距离是它到点B的距离的3倍,则点P的轨迹方程是
,动点P到点A的距离是它到点B的距离的3倍,则点P的轨迹方程是__________ .
,,动点P到点A的距离是它到点B的距离的3倍,则点P的轨迹方程是
您最近半年使用:0次


