已知圆心为 的圆经过点
的圆经过点 ,直线
,直线 :
: .
.
(1)求圆
 的方程;
的方程;(2)写出直线
恒过定点 的坐标,并求直线被圆所截得的弦长最短时
的坐标,并求直线被圆所截得的弦长最短时 的值及最短弦长.
的值及最短弦长.
更新时间:2024-01-24 14:03:43
|
相似题推荐
【推荐1】已知抛物线 ,设为直线
,设为直线 上一动点,过点作圆
上一动点,过点作圆 的两条切线,切点分别为
的两条切线,切点分别为 .
.

(1)证明:动直线 恒过定点
恒过定点 ;
;
(2)如图,设与(1)中的定点的连线交抛物线 于
于 两点,证明:
两点,证明:
,设为直线上一动点,过点作圆的两条切线,切点分别为. (1)证明:动直线
恒过定点;(2)如图,设
与(1)中的定点的连线交抛物线于两点,证明:
您最近半年使用:0次
解答题-证明题
|
适中
(0.65)
名校
解题方法
【推荐2】设直线l的方程为 .
.
(1)求证:不论a为何值,直线l必过一定点P;
(2)若直线l分别与x轴正半轴,y轴正半轴交于点 ,当
,当 面积最小时,求的周长及此时的直线方程;
面积最小时,求的周长及此时的直线方程;
(3)当直线l在两坐标轴上的截距均为正整数且a也为正整数时,求直线l的方程.
.(1)求证:不论a为何值,直线l必过一定点P;
(2)若直线l分别与x轴正半轴,y轴正半轴交于点
,当面积最小时,求的周长及此时的直线方程;(3)当直线l在两坐标轴上的截距均为正整数且a也为正整数时,求直线l的方程.
您最近半年使用:0次
 恒过抛物线
恒过抛物线 的焦点F,
的焦点F, ,求直线l的方程.
,求直线l的方程.
解答题-问答题
|
适中
(0.65)
名校
【推荐1】已知点 ,直线
,直线 .
.
(1)当变化时,求原点 到直线距离的最大时直线的方程;
到直线距离的最大时直线的方程;
(2)若直线上存在点 满足
满足 ,求实数的取值范围
,求实数的取值范围
,直线.(1)当
变化时,求原点到直线距离的最大时直线的方程;(2)若直线
上存在点满足,求实数的取值范围
您最近半年使用:0次
解答题-问答题
|
适中
(0.65)
名校
【推荐2】已知以点 (a∈R,且a≠0)为圆心的圆过坐标原点O,且与x轴交于点A,与y轴交于点B.
(a∈R,且a≠0)为圆心的圆过坐标原点O,且与x轴交于点A,与y轴交于点B.
(1)求△OAB的面积;
(2)设直线l:y=﹣2x+4与圆C交于点P、Q,若|OP|=|OQ|,求圆心C到直线l的距离.
(a∈R,且a≠0)为圆心的圆过坐标原点O,且与x轴交于点A,与y轴交于点B.(1)求△OAB的面积;
(2)设直线l:y=﹣2x+4与圆C交于点P、Q,若|OP|=|OQ|,求圆心C到直线l的距离.
您最近半年使用:0次
 :
: 及直线外一点
及直线外一点 .
. 到直线
到直线
解答题-问答题
|
适中
(0.65)
【推荐1】已知动点 与定点
与定点 的距离和它到直线
的距离和它到直线 的距离的比是常数
的距离的比是常数 .
.
(Ⅰ)求动点的轨迹方程 ;
;
(Ⅱ)直线交曲线于 两点,若圆
两点,若圆 以线段
以线段 为直径,求圆的方程.
为直径,求圆的方程.
与定点的距离和它到直线的距离的比是常数.(Ⅰ)求动点
的轨迹方程;(Ⅱ)直线
交曲线于两点,若圆以线段为直径,求圆的方程.
您最近半年使用:0次
解答题-问答题
|
适中
(0.65)
名校
解题方法
【推荐2】已知圆过两定点 ,且圆心在直线
,且圆心在直线 上;
上;
(1)求圆的方程;
(2)过点 的直线
的直线 交圆于
交圆于 两点,若
两点,若 ,求直线的方程.
,求直线的方程.
过两定点,且圆心在直线上;(1)求圆
的方程;(2)过点
的直线交圆于两点,若,求直线的方程.
您最近半年使用:0次
 上,且经过
上,且经过 ,
, .
. 且与圆
且与圆
解答题-应用题
|
适中
(0.65)
名校
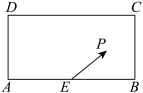
【推荐1】某校兴趣小组在如图所示的矩形区域ABCD内举行机器人拦截挑战赛,在E处按 方向释放机器人甲,同时在A处按某方向释放机器人乙,设机器人乙在Q处成功拦截机器人甲.若点Q在矩形区域ABCD内(包含边界),则挑战成功,否则挑战失败.
方向释放机器人甲,同时在A处按某方向释放机器人乙,设机器人乙在Q处成功拦截机器人甲.若点Q在矩形区域ABCD内(包含边界),则挑战成功,否则挑战失败.
已知 米,E为AB中点,机器人乙的速度是机器人甲的速度的2倍,比赛中两机器人均按匀速直线运动方式行进,记与
米,E为AB中点,机器人乙的速度是机器人甲的速度的2倍,比赛中两机器人均按匀速直线运动方式行进,记与 的夹角为
的夹角为 .
.
(1)若 ,AD足够长,则如何设置机器人乙的释放角度才能挑战成功?(结果精确到
,AD足够长,则如何设置机器人乙的释放角度才能挑战成功?(结果精确到 )
)
(2)如何设计矩形区域ABCD的宽AD的长度,才能确保无论的值为多少,总可以通过设置机器人乙的释放角度使机器人乙在矩形区域ABCD内成功拦截机器人甲?
方向释放机器人甲,同时在A处按某方向释放机器人乙,设机器人乙在Q处成功拦截机器人甲.若点Q在矩形区域ABCD内(包含边界),则挑战成功,否则挑战失败.已知
米,E为AB中点,机器人乙的速度是机器人甲的速度的2倍,比赛中两机器人均按匀速直线运动方式行进,记与的夹角为.(1)若
,AD足够长,则如何设置机器人乙的释放角度才能挑战成功?(结果精确到)(2)如何设计矩形区域ABCD的宽AD的长度,才能确保无论
的值为多少,总可以通过设置机器人乙的释放角度使机器人乙在矩形区域ABCD内成功拦截机器人甲?
您最近半年使用:0次
【推荐2】已知圆心为C的圆经过点 和
和 ,且圆心在直线l:
,且圆心在直线l: ,求:
,求:
(1)求圆心为C的圆的标准方程:
(2)设点 在圆C内,过点P的最长弦和最短弦分别为AC和BD,求四边形ABCD的面积:
在圆C内,过点P的最长弦和最短弦分别为AC和BD,求四边形ABCD的面积:
(3)若过点 的直线被圆C所截得弦长为8,求该直线的方程.
的直线被圆C所截得弦长为8,求该直线的方程.
和,且圆心在直线l:,求:(1)求圆心为C的圆的标准方程:
(2)设点
在圆C内,过点P的最长弦和最短弦分别为AC和BD,求四边形ABCD的面积:(3)若过点
的直线被圆C所截得弦长为8,求该直线的方程.
您最近半年使用:0次

 (
( 是参数)
是参数) 变化时指出曲线
变化时指出曲线

