1 . 2023年8月16日,备受瞩目的世界机器人大会在北京盛大开幕。新一代送餐机器人首次登场,如图所示,只要设置好路线、放好餐盘,它就会稳稳地举着托盘,到达指定的位置送餐。已知配餐点和目标位置在一条直线通道上,机器人送餐时从静止开始启动,加速过程的加速度大小 ,速度达到
,速度达到 后匀速,之后适时匀减速,减速历时2s恰好把食物平稳送到目标位置,整个送餐用时
后匀速,之后适时匀减速,减速历时2s恰好把食物平稳送到目标位置,整个送餐用时 ,若载物平台始终呈水平状态,食物与餐盘的总质量
,若载物平台始终呈水平状态,食物与餐盘的总质量 ,食物、餐盘与平台间无相对滑动,取重力加速度
,食物、餐盘与平台间无相对滑动,取重力加速度 ,试求:
,试求:
(1)在送餐的过程中机器人匀速运动的时间 ;
;
(2)配餐点和目标位置的直线距离x;
(3)减速过程中食物和餐盘整体在水平方向的摩擦力f大小。
,速度达到后匀速,之后适时匀减速,减速历时2s恰好把食物平稳送到目标位置,整个送餐用时,若载物平台始终呈水平状态,食物与餐盘的总质量,食物、餐盘与平台间无相对滑动,取重力加速度,试求:(1)在送餐的过程中机器人匀速运动的时间
;(2)配餐点和目标位置的直线距离x;
(3)减速过程中食物和餐盘整体在水平方向的摩擦力f大小。

您最近半年使用:0次
解题方法
2 . 如图为某小区门口的车牌自动识别系统示意图。离地高1m的栏杆可绕O点在竖直面内做匀速圆周运动。自动识别起始线ab与栏杆正下方cd 的距离为4.5m ,路面宽度ab为2.4m, ac与O点的水平距离为0.4m。某货车前端行驶到起始线ab时的速度为3m/s。货车可看成长宽高分别为4.5m、1.6m和1.9m的长方体,忽略车牌识别时间。
(1)求货车匀速通过识别区域所用时间;
(2)若货车过自动识别起始线时司机发现栏杆没有抬起,于是采取制动措施,货车刚好未撞杆。已知司机的反应时间为0.7s,求刹车时货车的加速度大小;
(3)若货车匀速通过识别区域,求栏杆转动角速度的最小值。
(1)求货车匀速通过识别区域所用时间;
(2)若货车过自动识别起始线时司机发现栏杆没有抬起,于是采取制动措施,货车刚好未撞杆。已知司机的反应时间为0.7s,求刹车时货车的加速度大小;
(3)若货车匀速通过识别区域,求栏杆转动角速度的最小值。

您最近半年使用:0次
3 . 某跳伞运动员做低空跳伞表演。从该运动员离开悬停的飞机开始计时,运动员先做自由落体运动,当速度达到50m/s时打开降落伞做匀减速直线运动,加速度大小为 5m/s2,到达地面时速度为 5m/s。下列说法正确的是( )

| A.运动员离开飞机10s后打开降落伞 |
| B.运动员在空中下落过程用时9s |
| C.运动员距离地面245m时打开降落伞 |
| D.悬停的飞机距离地面372.5m |
您最近半年使用:0次
4 . 近年来,中国在无人机研发方面取得了显著进展,不仅在无人机种类和功能上不断创新,而且在技术参数和性能上也有了显著提升。如图所示为我国生产的某型号无人机竖直向上运送货物时的情景,已知无人机从地面启动时匀加速上升,加速度大小为3m/s2,达到最大速度18m/s后匀速运动,制动时匀减速上升,加速度大小为2m/s2,从起飞到悬停全程用时45 s。求:
(1)无人机加速阶段上升的高度;
(2)质量为20kg的货物用细绳系于无人机下方,在加速阶段货物对细绳的拉力;
(3)无人机上升的总高度。
(1)无人机加速阶段上升的高度;
(2)质量为20kg的货物用细绳系于无人机下方,在加速阶段货物对细绳的拉力;
(3)无人机上升的总高度。

您最近半年使用:0次
5 . 一个质点做变速直线运动的 v-t图像如图所示,下列说法中正确的是( )
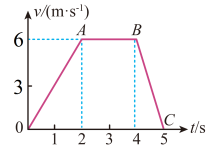
| A.在AB 段时物体处于静止状态 |
| B.前2s内的运动方向与第5s内的运动方向相反 |
| C.BC段的加速度方向与速度方向相反 |
| D.第2s内的加速度为6m/s2 |
您最近半年使用:0次
名校
6 . 小姚同学根据所学的物理知识,用3D打印技术制作了AOPB轨道,轨道材质坚硬,整个轨道固定在竖直平面上,各部分平滑连接。其中长度为L1=0.1m的水平轨道AO和长度为 的倾斜轨道PB皆为直线,轨道OP为抛物线,两直轨道与抛物线相切。以O点为原点、AO所在的直线为x轴,在轨道平面的内侧建立y轴,如图所示,轨道OP抛物线方程为y=5x2.弹射器1将小环从A点弹射出来,小环与轨道OP刚好无相互作用,再与弹射器2碰撞,小环在轨道上往返运动。已知P点横坐标x=0.1m,不计一切阻力,小环与弹射器碰撞无机械能损失,忽略小环和弹射器的作用时间。
的倾斜轨道PB皆为直线,轨道OP为抛物线,两直轨道与抛物线相切。以O点为原点、AO所在的直线为x轴,在轨道平面的内侧建立y轴,如图所示,轨道OP抛物线方程为y=5x2.弹射器1将小环从A点弹射出来,小环与轨道OP刚好无相互作用,再与弹射器2碰撞,小环在轨道上往返运动。已知P点横坐标x=0.1m,不计一切阻力,小环与弹射器碰撞无机械能损失,忽略小环和弹射器的作用时间。
(1)求P点y轴坐标y,小环经O点速度v0的大小;
(2)经P点的速度vP大小和与x轴正向的夹角α;
(3)小环往返运动的周期T;
(4)若将轨道平面调整为与水平地面平行,小环以相同速度从A点弹射,在轨道OP段小环速度沿x轴的分量随x增大将如何变化?(不必说明理由)
的倾斜轨道PB皆为直线,轨道OP为抛物线,两直轨道与抛物线相切。以O点为原点、AO所在的直线为x轴,在轨道平面的内侧建立y轴,如图所示,轨道OP抛物线方程为y=5x2.弹射器1将小环从A点弹射出来,小环与轨道OP刚好无相互作用,再与弹射器2碰撞,小环在轨道上往返运动。已知P点横坐标x=0.1m,不计一切阻力,小环与弹射器碰撞无机械能损失,忽略小环和弹射器的作用时间。(1)求P点y轴坐标y,小环经O点速度v0的大小;
(2)经P点的速度vP大小和与x轴正向的夹角α;
(3)小环往返运动的周期T;
(4)若将轨道平面调整为与水平地面平行,小环以相同速度从A点弹射,在轨道OP段小环速度沿x轴的分量随x增大将如何变化?(不必说明理由)

您最近半年使用:0次
7 . 香海大桥为广东省重点交通项目,已于2022年全线通车,其与江珠高速公路有相交点,可进一步促进大湾区内珠中江地区融合发展,已知大桥全长 ,其中主线长
,其中主线长 ,支线长
,支线长 ,支线路段限速为
,支线路段限速为 。若一辆汽车以加速度
。若一辆汽车以加速度 从静止开始驶入支线,先直线加速到
从静止开始驶入支线,先直线加速到 后保持匀速率行驶,则下列说法正确的是( )
后保持匀速率行驶,则下列说法正确的是( )
,其中主线长,支线长,支线路段限速为。若一辆汽车以加速度从静止开始驶入支线,先直线加速到后保持匀速率行驶,则下列说法正确的是( )A.汽车加速时间为 | B.指的是位移 |
| C.指的是平均速度 | D.汽车通过支线的时间小于9分钟 |
您最近半年使用:0次
名校
8 . 无人驾驶汽车已在我国某些地区开始上路试运行,一国产无人驾驶汽车,在试驾过程中以10m/s的速度行驶。人工智能发现车头前方37.5m处的斑马线上有行人,为礼让行人汽车自动刹车,开始做匀减速运动,减速过程v-x图像如图所示,则( )

| A.汽车的加速度大小为2m/s2 |
| B.汽车经过斑马线时速度还未减为0,所以行人一定会被撞 |
| C.若行人通过斑马线的时间是4s,则行人没有被撞的危险 |
| D.汽车开始减速后10s内,其位移大小恰好为37.5m |
您最近半年使用:0次
9 . 相同材料的两个物块 和
和 放在同一水平面上,用相同的水平拉力
放在同一水平面上,用相同的水平拉力 分别作用在两物块上,一段时间后撤去拉力,两物块运动的
分别作用在两物块上,一段时间后撤去拉力,两物块运动的 图像如图所示,已知
图像如图所示,已知 ,在整个运动过程中,下列说法正确的是( )
,在整个运动过程中,下列说法正确的是( )
和放在同一水平面上,用相同的水平拉力分别作用在两物块上,一段时间后撤去拉力,两物块运动的图像如图所示,已知,在整个运动过程中,下列说法正确的是( )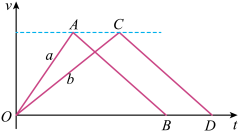
| A.的质量小于的质量 |
| B.两种情况下拉力做的功相等 |
| C.两种情况下克服摩擦力做的功相等 |
| D.两种情况下合外力做的功相等 |
您最近半年使用:0次
10 . 利用智能手机和钕磁粒测量滑块在斜面上运动的加速度。如图甲所示,一斜面上安装有两组磁粒,其中B组磁粒固定在斜面上靠近底端处,A组磁粒的位置可移动(A组磁粒更靠近滑块),两组磁粒之间的距离为x。在滑块上面安装智能手机,打开APP中的磁力计,将滑块从斜面上的O点由静止释放,滑块依次经过两组磁粒附近时,手机磁力计会测出磁感应强度的峰值,该峰值所对应的时刻就是智能手机磁力计到达该组磁粒所在位置的时刻,而相邻两个峰值之间的时间差即是智能手机磁力计依次经过两组磁粒所用的时间t。改变A组磁粒的位置进行多次测量,每次都使滑块从O点由静止释放,并用米尺测量A、B之间的距离x,记下相应的t值,所得数据如图乙所示。
(1)若滑块所受摩擦力为一常量,滑块加速度的大小a、滑块经过B组磁粒的瞬时速度 、测量值x和t四个物理量之间所满足的关系式是
、测量值x和t四个物理量之间所满足的关系式是______ ;
(2)根据图乙信息补充表格中缺失的数据:
______ s,
______  ;
;
(3)在答题纸上的图丙中,描出第5、6两组数据对应的点并画出 图线
图线______ ;图线,可得滑块加速度的大小为
______  (保留3位有效数字)。
(保留3位有效数字)。

| 1组 | 2组 | 3组 | 4组 | 5组 | 6组 | |
 | 0.30 | 0.40 | 0.50 | 0.60 | 0.70 | 0.80 |
 | 0.21 | 0.29 | 0.40 | 0.49 | 0.81 | |
 | 1.43 | 1.38 | 1.25 | 1.22 | 0.99 |
(1)若滑块所受摩擦力为一常量,滑块加速度的大小a、滑块经过B组磁粒的瞬时速度
、测量值x和t四个物理量之间所满足的关系式是(2)根据图乙信息补充表格中缺失的数据:
;(3)在答题纸上的图丙中,描出第5、6两组数据对应的点并画出
图线
图线,可得滑块加速度的大小为(保留3位有效数字)。
您最近半年使用:0次


