1.下列物体运动过程中,可认为机械能守恒的是( )
| A.树叶从树枝上落下的运动 | B.氢气球拉线断了后的运动 |
| C.集装箱被起重机匀加速吊起的运动 | D.被投掷后的铅球在空中的运动 |
 、机械能E随位移x的变化关系中可能正确的是(图中虚线均为图像的切线)( )
、机械能E随位移x的变化关系中可能正确的是(图中虚线均为图像的切线)( )A.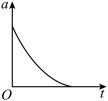 | B.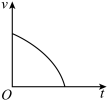 | C. | D. |
 作用下,做速度为
作用下,做速度为 的匀速运动;若作用力变为斜向上的恒力
的匀速运动;若作用力变为斜向上的恒力 ,物体做速度为
,物体做速度为 的匀速运动,且与功率相同。则可能有( )
的匀速运动,且与功率相同。则可能有( )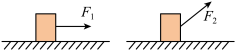
A. , , | B., |
C. , , | D. , , |
 。
。
 ,某次测量中,摆锤通过它的时间为
,某次测量中,摆锤通过它的时间为 ,则摆锤的速度为
,则摆锤的速度为
 ,动能
,动能
(2)实验前已测得
 、
、 、B、A各点高度分别为
、B、A各点高度分别为 、
、 、
、 、
、 。某同学获得的实验数据如图b,分析表中数据发现:从A到D,机械能逐渐
。某同学获得的实验数据如图b,分析表中数据发现:从A到D,机械能逐渐次数 | D | C | B | A |
高度 | 0 | 0.050 | 0.100 | 0.150 |
速度 | 1.878 | 1.616 | 1.299 | 0.866 |
势能 | 0 | 0.0039 | 0.0078 | 0.0118 |
动能 | 0.0141 | 0.0104 | 0.0067 | 0.003 |
机械能 | 0.0141 | 0.0144 | 0.0146 | 0.0148 |





 、、三个点的机械能数据较为接近,而用A点高度算出重力势能作为A点机械能,明显小于、、三点的机械能数据,分析其原因可能是摆锤的实际释放点
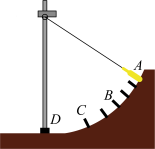
、、三个点的机械能数据较为接近,而用A点高度算出重力势能作为A点机械能,明显小于、、三点的机械能数据,分析其原因可能是摆锤的实际释放点5.如图所示,一弹射游戏装置由安装在水平台面上的固定弹射器、竖直圆轨道(在最低点E分别与水平轨道
 和
和 相连)、高度h可调的斜轨道
相连)、高度h可调的斜轨道 组成。游戏时滑块从O点弹出,经过圆轨道并滑上斜轨道。全程不脱离轨道且恰好停在B端则视为游戏成功。已知圆轨道半径
组成。游戏时滑块从O点弹出,经过圆轨道并滑上斜轨道。全程不脱离轨道且恰好停在B端则视为游戏成功。已知圆轨道半径 ,
, 长
长 ,
, 长
长 ,圆轨道和
,圆轨道和 光滑,滑块与、之间的动摩擦因数
光滑,滑块与、之间的动摩擦因数 。滑块质量
。滑块质量 且可视为质点,弹射时从静止释放且弹簧的弹性势能完全转化为滑块动能。忽略空气阻力,
且可视为质点,弹射时从静止释放且弹簧的弹性势能完全转化为滑块动能。忽略空气阻力, ,各部分平滑连接。求:
,各部分平滑连接。求:(1)滑块恰好能过圆轨道最高点F时的速度
 大小;
大小;(2)当
 且游戏成功时,滑块经过E点对圆轨道的压力
且游戏成功时,滑块经过E点对圆轨道的压力 及弹簧弹性势能
及弹簧弹性势能 ;
;(3)要使游戏成功,弹簧的弹性势能
 与高度h之间满足的关系。
与高度h之间满足的关系。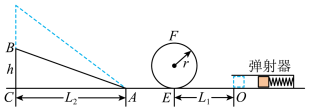
在早期工业革命中,工程师们需要有一个用来比较各类机器工作效果的办法,在摸索和实践中,大家逐渐同意用机器举起的物体的质量与路程的乘积来量度机器的功效。于是在1826年法国科学家蓬瑟勒将力和力的作用点的位移之积取名为“功”,从而正式引入了功的概念。但是当时的人们只是知道功的量度,并不知道功代表的是什么。1847年,赫尔姆霍茨也只是说:“功是可以用磅或热量单位来表示的东西,而这些单位的数目对于一定量的功来说是不变的;其次,除了机械力和热外,化学力和电力也能做功,……”
1.人造地球卫星在椭圆轨道上运动,其由近地点运动到远地点的过程中,万有引力对卫星的做功情况,下列判断正确的是( )
| A.做正功 | B.做负功 | C.不做功 | D.不能判定 |
 ,重力势能变化量分别为
,重力势能变化量分别为 。则它们的大小关系是( )
。则它们的大小关系是( )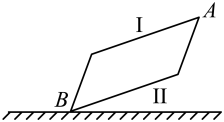
A. | B. | C. | D. |
 的小球以一定的初速度滑上高为
的小球以一定的初速度滑上高为 的光滑曲面,小球到达曲面顶端时速度刚好为零。重力加速度为
的光滑曲面,小球到达曲面顶端时速度刚好为零。重力加速度为 。则下列说法正确的是( )
。则下列说法正确的是( )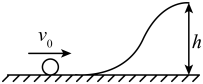
A.小球的初速度大小为 |
B.小球在曲面底端时重力的功率为 |
C.在该运动过程中小球的动能减小 |
| D.在该运动过程中小球的机械能减小 |
 的箱子从固定斜面的顶端由静上开始下滑,滑到底端时的速度大小为
的箱子从固定斜面的顶端由静上开始下滑,滑到底端时的速度大小为 ,此过程中合力对箱子所做的功为
,此过程中合力对箱子所做的功为 ,箱子滑到底端时具有的动能为
,箱子滑到底端时具有的动能为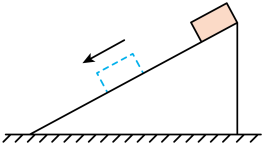
5.如图,在“用DIS验证机械能守恒定律”的实验中,
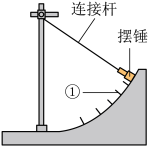
(1)该实验装置中①为
(2)若将连接杆放置在图示位置由静止释放,已知连接杆悬点到摆锤质心的距离为l,杆与竖直方向夹角为
 ,不计阻力,则摆锤运动到最低点的速度为
,不计阻力,则摆锤运动到最低点的速度为(3)增大摆锤的迎风面,将质量为m的摆锤仍于图示位置由静止释放,测得其运动到最低点的速度为v,则可推得此过程中阻力对摆锤做功为
(1)实验中,将完全相同的挡光片依次固定在圆弧轨道上,摆锤内置光电门,当摆锤经过挡光片时,光电门自动记录遮光时间。若挡光片的宽度为d,挡光时间为
 ,则摆锤经过挡光片时的速度大小为
,则摆锤经过挡光片时的速度大小为(2)关于摆锤机械能守恒的条件,以下理解正确的是
A.摆锤仅受重力时,机械能才守恒
B.只有合外力为零时,机械能才守恒
C.只有重力对摆锤做功时,机械能才守恒
D.只有合外力做功为零时,机械能才守恒
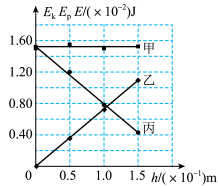
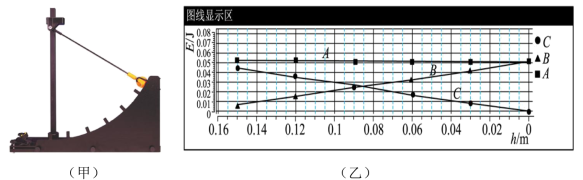
(3)实验结果绘制数据如图所示,图像的横轴表示摆锤距离最低点的高度,纵轴表示摆锤的重力势能Ep,动能Ek,或机械能E。其中表示摆锤的重力势能Ep、动能Ek图线分别是
(4)另一小组记录了每个挡光片所在位置到最低点的高度h及其相应的挡光时间
后,绘制了 四幅图像。其中可以说明机械能守恒的图像是
四幅图像。其中可以说明机械能守恒的图像是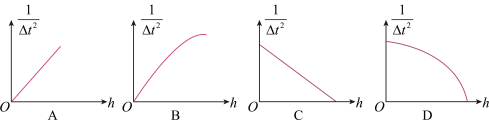

(1)本实验每次从
(2)在实验中测得C点机械能明显偏小,造成这个误差最主要的原因可能是
A. 摆锤释放的位置高于A点
B. A点释放的摆锤初速度不为零
C. 摆锤运动过程中受到空气阻力的作用
D. 光电门放置的位置高于C点
(3)若以摆锤速度的平方为纵坐标,以摆锤距离零势能D点的高度为横坐标,作出的直线斜率为a,截距为b,则当地重力加速度g可表示为
(4)摆锤示意图如图,摆锤通过光电门的瞬时速度是利用摆锤的直径d除以挡光时间计算的,忽略空气阻力的影响,若摆锤直径d过大,则最低点D的机械能测量值相比真实值


请与他们一起完成如下探究问题。
1.要将“海盗船”搬到实验室,小明组内讨论首先要进行简化处理。他们选用了小钢球、细绳、铁架台,搭建了如图所示的“摆”结构。你认为他们这样简化所采用的物理思想方法是

2.小组认为:海盗船项目存在一定的风险,尤其是当其摆到最低点位置,他们认为此处连接船体的连接杆的力F最大,并猜想该力F甲与海盗船摆到最低点时的速度v有关。于是,他们在“摆”结构上进行探究:
(1)首先,小组在铁架台甲处固定了力传感器用以测量细绳上的拉力F,并在最低点乙处安装了传感器用以测量钢球速度,如图所示。

(2)接着,他们测出小钢球半径r和细线的长度为L。将小球拉到某一位置释放,若测量出小球到达最低点的速度为v、小球质量为m,重力加速度为g,则理论上小球到最低点时,力F的表达式为
(3)然后,小组分别将小球从不同位置释放,测出每次小球在最低位置时的F和v,如下表:
| 位置 | 1 | 2 | 3 | 4 | 5 |
| F/N | 0.50 | 0.60 | 0.64 | 0.70 | 0.90 |
| v/(m/s) | 0.40 | 0.50 | 0.60 | 0.70 | 1.00 |
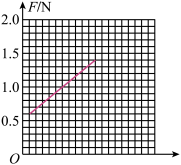
(4)接着,小明认为质量“有较小的差别”是因为重力加速度g取值与实际值略有偏差,于是他们将摆球摆动的角度控制在5°范围内,再次用传感器测出细线拉力F随时间t的变化图像,如图,测出此时细线长为63cm、小钢球直径为1.0cm,则重力加速度应该修正为g=

(5)最后,小组经过讨论认为每次将小钢球以不同的初速度释放,图中的数据图像的形态和位置
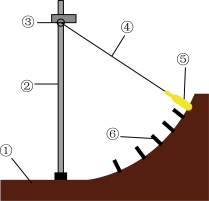
3.连接杆为了探究海盗船运行过程中的能量情况,小组又采用了如图所示的“验证机械能守恒定律”的实验装置。
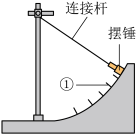
(1)该实验装置中,数据处理时,连接杆的动能和重力势能可以忽略不计,这是由于:
(2)若将连接杆放置在图示位置由静止释放,已知连接杆悬点到摆锤质心的距离为L,杆与竖直方向夹角为θ,不计阻力,则摆锤运动到最低点的速度应为多大
(3)增大摆锤的迎风面,将质量为m的摆锤仍于图示位置由静止释放,测得最低处速度为v,则可推得此过程中阻力对摆锤做功为
6 . 某实验小组为验证系统机械能守恒,设计了如图甲所示的装置,实验过程如下:

(1)用螺旋测微器测量砝码上端固定的遮光片厚度d时,螺旋测微器示数如图乙所示,则d =
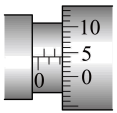
(2)按图甲安装实验器材并调试,确保砝码竖直上下振动时,遮光片运动最高点高于光电门1的激光孔,运动最低点低于光电门2的微光孔;
(3)实验时,利用计算机记录弹簧拉伸量x及力传感器的读数F,画出F—x图像,如图丙所示;

(4)测量遮光片经过光电门1的挡光时间t1= 0.0051s,弹簧的拉伸量x1 = 0.04m,经过光电门2的挡光时间t2= 0.0102s,弹簧的拉伸量x2= 0.08m,以及两个光电门激光孔之间的距离h = 0.04m;
(5)遮光片从光电门1运动到光电门2的过程中,弹性势能的增加量Ep1=
 ,摆锤的质量
,摆锤的质量 。取D所在水平面为零势能面,A、B、C三点相对于零势能面的高度如图所示,实验获取的数据如下表:
。取D所在水平面为零势能面,A、B、C三点相对于零势能面的高度如图所示,实验获取的数据如下表:位置 | h/cm | t/s |
|
A | 15 | 0.007826 | 1.022 |
B | 10 | 0.005598 | 1.429 |
C | 5 | 0.004607 | ? |
D | 0 | 0.003998 | 2.001 |


(1)本实验使用的是
(2)表格中“?”所代表的物理量的值为
(3)实验中该同学发现挡光片所在的位置略高于A点,则他通过计算机获得的速度数据与真实值比
(4)该同学认为,如果分析t与h的关系,也能验证机械能守恒定律。所以该同学将数据进一步处理,作出“
 ”图,图线如图所示,若该图线的斜率绝对值为k,事后另一个同学再次重复进行实验,并将释放点抬高,并保持不变,测出了新的四组数据重新作图,图线的斜率绝对值为
”图,图线如图所示,若该图线的斜率绝对值为k,事后另一个同学再次重复进行实验,并将释放点抬高,并保持不变,测出了新的四组数据重新作图,图线的斜率绝对值为 。则k。(选填“>”、“=”或“<”)。
。则k。(选填“>”、“=”或“<”)。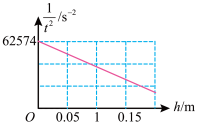

高度h/m | 0.08 | 0.06 | 0.04 | 0.02 | 0 |
势能Ep/J | 0.0236 | 0.0177 | B | 0.0059 | 0.0000 |
动能Ek/J | A | 0.0328 | 0.0395 | 0.0444 | 0.0501 |
机械能E/J | 0.0504 | 0.0505 | C | 0.0503 | 0.0501 |
A.摆锤仅受重力时,机械能才守恒
B.只有合外力为零时,机械能才守恒
C.只有重力对摆锤做功时,机械能才守恒
D.只有合外力做功为零时,机械能才守恒
(2)摆锤内置光电门,当摆锤经过挡光片时,光电门自动记录遮光时间。若挡光片的宽度为d,挡光时间为t,则摆锤经过挡光片时的速度大小为
(3)表中A、B处数据应为

摆锤位置 | A | B | C | D |
h/×10-2m | 15 | 10 | 5 | 0 |
Ek/×10-2J | 0.45 | 0.80 | 1.20 | 1.55 |
Ep/×10-2J | 1.10 | 0.73 | 0.37 | 0.00 |
(2)本实验用到的传感器是
(3)某同学认为:该实验的摆锤质量未知也可以验证机械能守恒定律,该同学的说法
(2)三个同学根据不同的实验条件,进行了“探究平抛运动规律”的实验:
(a)甲同学采用如图①所示的装置。用小锤打击弹性金属片,金属片把A球沿水平方向弹出,同时B球被松开,自由下落,观察到两球同时落地,改变小锤打击的力度,即改变A球被弹出时的速度,两球仍然同时落地,这说明
(b)乙同学采用如图②所示的装置。两个相同的弧形轨道M、N,分别用于发射小铁球P、Q,其中N的末端与可看作光滑的水平板相切;两轨道上端分别装有电磁铁C、D;调节电磁铁C、D的高度,使
 ,从而保证小铁球P、Q在轨道出口处的水平初速度
,从而保证小铁球P、Q在轨道出口处的水平初速度 相等,现将小铁球P、Q分别吸在电磁铁C、D上,然后切断电源,使两小铁球能以相同的初速度同时分别从轨道M、N的下端射出。实验能观察到的现象是
相等,现将小铁球P、Q分别吸在电磁铁C、D上,然后切断电源,使两小铁球能以相同的初速度同时分别从轨道M、N的下端射出。实验能观察到的现象是(c)丙同学采用频闪摄影的方法拍摄到如图③所示的“小球做平抛运动”的照片。图中每个小方格的边长为10cm,则由图可求得该小球平抛的初速度大小为



