1 . 已知椭圆 的右焦点为F,离心率为e,从第一象限内椭圆
的右焦点为F,离心率为e,从第一象限内椭圆 上一点P向x轴作垂线,垂足为F,且tan∠POF=e,△POF的面积为
上一点P向x轴作垂线,垂足为F,且tan∠POF=e,△POF的面积为
(1)求椭圆C的标准方程;
(2)若直线l//PO,椭圆C与直线l的交于A,B两点,求△APB的面积的最大值.
的右焦点为F,离心率为e,从第一象限内椭圆上一点P向x轴作垂线,垂足为F,且tan∠POF=e,△POF的面积为(1)求椭圆C的标准方程;
(2)若直线l//PO,椭圆C与直线l的交于A,B两点,求△APB的面积的最大值.
您最近一年使用:0次
2021-12-03更新
|
828次组卷
|
4卷引用:江苏省连云港市2021-2022学年高二上学期期中数学试题
江苏省连云港市2021-2022学年高二上学期期中数学试题江苏省扬州大学附属中学2022-2023学年高二上学期期中数学试题(已下线)专题28 圆锥曲线求范围及最值六种类型大题100题-【千题百练】2022年新高考数学高频考点+题型专项千题百练(新高考适用)(已下线)2.8直线与圆锥曲线的位置关系(2)
20-21高一·全国·单元测试
名校
解题方法
2 . 在 中,
中, 、
、 、
、 的对边分别为
的对边分别为 、
、 、
、 ,其中边最长,并且
,其中边最长,并且 .
.
(1)求证:是直角三角形;
(2)当 时,求面积的最大值.
时,求面积的最大值.
中,、、的对边分别为、、,其中边最长,并且.(1)求证:
是直角三角形;(2)当
时,求面积的最大值.
您最近一年使用:0次
2021-12-01更新
|
2042次组卷
|
8卷引用:11.2正弦定理(第3课时)-【上好课】2021-2022学年高一数学同步备课系列(苏教版2019必修第二册)
(已下线)11.2正弦定理(第3课时)-【上好课】2021-2022学年高一数学同步备课系列(苏教版2019必修第二册)沪教版(2020) 必修第二册 堂堂清 第六章 复习检测六(已下线)增分专题二 解三角形范围与最值问题(已下线)6.4 平面向量的应用(已下线)第一次月考押题预测卷(考试范围:第六-七章)(已下线)第6章 平面向量及其应用(单元基础卷)-2021-2022学年高一数学考试满分全攻略(人教A版2019必修第二册)(已下线)第21节 解三角形甘肃省民勤县第一中学2021-2022学年高一下学期第一次月考数学试题
20-21高一·全国·课后作业
名校
3 . (1)已知 ,求
,求 的最大值.
的最大值.
(2)已知 ,求
,求 的最大值.
的最大值.
(3)已知 ,求
,求 的最大值.
的最大值.
,求的最大值.(2)已知
,求的最大值.(3)已知
,求的最大值.
您最近一年使用:0次
2021-11-26更新
|
1376次组卷
|
3卷引用:3.2 基本不等式
名校
解题方法
4 . 已知二次函数 .
.
(1)若 的解集为
的解集为 ,求不等式
,求不等式 的解集;
的解集;
(2)若对任意 ,
, 恒成立,求
恒成立,求 的最大值;
的最大值;
(3)若对任意, 恒成立,求
恒成立,求 的最大值.
的最大值.
.(1)若
的解集为,求不等式的解集;(2)若对任意
,恒成立,求的最大值;(3)若对任意
,恒成立,求的最大值.
您最近一年使用:0次
2022-03-30更新
|
1392次组卷
|
16卷引用:江苏省苏州市吴中区2020-2021学年高一上学期期中数学试题
江苏省苏州市吴中区2020-2021学年高一上学期期中数学试题江苏省南通市如东高级中学2021-2022学年高一上学期10月阶段测试一数学试题第3章 不等式(章末测试基础卷)-2021-2022学年高一数学同步单元测试定心卷(苏教版2019必修第一册)江苏省南京外国语学校2022-2023学年高一上学期10月月考数学试题江苏省连云港市赣榆智贤中学2022-2023学年高一上学期10月联考数学试题江苏省苏州市吴江中学2023-2024学年高一上学期10月月考数学试题贵州省威宁彝族回族苗族自治县第四中学2021-2022学年高一上学期第一次月考数学试题安徽省芜湖市第一中学2021-2022学年高一上学期期中数学试题甘肃省兰州市第一中学2021-2022学年高一上学期期中考试数学试题湖南省郴州市永兴县童星学校2022-2023学年高三上学期第一次月考数学试题浙江省温州市苍南县金乡卫城中学2022-2023学年高一上学期第一次月考数学试题江西省乐平中学2022-2023学年高一上学期10月月考数学试题黑龙江省鹤岗市第一中学2022-2023学年高一上学期10月月考数学试题江西省遂川中学2021-2022学年高一上学期第一次月考数学试题(B卷)安徽省合肥市庐江第五中学2022-2023学年高一上学期期中数学试题新疆喀什地区莎车县第一中学2022-2023学年高一上学期11月月考数学试题
20-21高一·江苏·课后作业
5 . 已知正数 ,
, 满足
满足 ,求
,求 的最小值.
的最小值.
,满足,求的最小值.
您最近一年使用:0次
20-21高一·江苏·课后作业
6 . 设, ,且
,且 ,求的最大值.
,求的最大值.
,,且,求的最大值.
您最近一年使用:0次
21-22高二上·湖北黄石·阶段练习
名校
解题方法
7 . 已知直线 过点
过点 且与轴、轴的正半轴分别交于
且与轴、轴的正半轴分别交于 、
、 两点,
两点, 为坐标原点,
为坐标原点,
(1)求三角形 面积取最小值时直线的方程;
面积取最小值时直线的方程;
(2)求 取最小值时直线的方程.
取最小值时直线的方程.
过点且与轴、轴的正半轴分别交于、两点,为坐标原点,(1)求三角形
面积取最小值时直线的方程;(2)求
取最小值时直线的方程.
您最近一年使用:0次
21-22高二上·湖南·阶段练习
名校
解题方法
8 . 某校兴趣小组在如图所示的矩形区域 内举行机器人拦截挑战赛,在E处按
内举行机器人拦截挑战赛,在E处按 方向释放机器人甲,同时在A处按
方向释放机器人甲,同时在A处按 方向释放机器人乙,设机器人乙在M处成功拦截机器人甲,两机器人停止运动,若点M在矩形区域内(包含边界),则挑战成功,否则挑战失败.已知
方向释放机器人乙,设机器人乙在M处成功拦截机器人甲,两机器人停止运动,若点M在矩形区域内(包含边界),则挑战成功,否则挑战失败.已知 米,E为
米,E为 中点,比赛中两机器人均匀速直线运动方式行进,记与
中点,比赛中两机器人均匀速直线运动方式行进,记与 的夹角为
的夹角为 ,与
,与 的夹角为
的夹角为
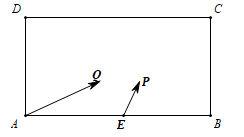
(1)若两机器人运动方向的夹角为 足够长,机器人乙挑战成功,求两机器人运动路程和的最大值;
足够长,机器人乙挑战成功,求两机器人运动路程和的最大值;
(2)已知机器人乙的速度是机器人甲的速度的2倍
(i)若 足够长,求机器人乙能否挑战成功.
足够长,求机器人乙能否挑战成功.
(ii)如何设计矩形区域的宽 的长度,才能确保无论
的长度,才能确保无论 的值为多少,总可以通过设置机器人乙的释放角度
的值为多少,总可以通过设置机器人乙的释放角度 使机器人乙挑战成功?
使机器人乙挑战成功?
内举行机器人拦截挑战赛,在E处按方向释放机器人甲,同时在A处按方向释放机器人乙,设机器人乙在M处成功拦截机器人甲,两机器人停止运动,若点M在矩形区域内(包含边界),则挑战成功,否则挑战失败.已知米,E为中点,比赛中两机器人均匀速直线运动方式行进,记与的夹角为,与的夹角为(1)若两机器人运动方向的夹角为
足够长,机器人乙挑战成功,求两机器人运动路程和的最大值;(2)已知机器人乙的速度是机器人甲的速度的2倍
(i)若
足够长,求机器人乙能否挑战成功.(ii)如何设计矩形区域
的宽的长度,才能确保无论的值为多少,总可以通过设置机器人乙的释放角度使机器人乙挑战成功?
您最近一年使用:0次
2021-10-14更新
|
266次组卷
|
4卷引用:11.3正弦定理与余弦定理的应用(备作业)-【上好课】2021-2022学年高一数学同步备课系列(苏教版2019必修第二册)
(已下线)11.3正弦定理与余弦定理的应用(备作业)-【上好课】2021-2022学年高一数学同步备课系列(苏教版2019必修第二册)湖南省A佳大联考2021-2022学年高二上学期10月月考数学试题福建省2021-2022学年高二10月联考数学试题湖北省宜昌市长阳土家族自治县第一高级中学2023-2024学年高一下学期3月月考数学试题
2021高一·全国·专题练习
名校
解题方法
9 . (1)已知0<x< ,求y=x(1-2x)的最大值.
,求y=x(1-2x)的最大值.
(2)已知x<3,求f(x)= +x的最大值.
+x的最大值.
(3)已知x,y∈R+,且x+y=4,求 +
+ 的最小值;
的最小值;
,求y=x(1-2x)的最大值.(2)已知x<3,求f(x)=
+x的最大值.(3)已知x,y∈R+,且x+y=4,求
+的最小值;
您最近一年使用:0次
2021-08-30更新
|
3549次组卷
|
16卷引用:专题3.1 不等式 章末检测1(易)-【满分计划】2021-2022学年高一数学阶段性复习测试卷(苏教版2019必修第一册)
(已下线)专题3.1 不等式 章末检测1(易)-【满分计划】2021-2022学年高一数学阶段性复习测试卷(苏教版2019必修第一册)(已下线)3.2.1基本不等式(1)(备作业)-【上好课】2021-2022学年高一数学同步备课系列(苏教版2019必修第一册)江西省宜春市上高县第二中学2021-2022学年高一上学期第一次月考数学试题江西省宜春市上高二中2021-2022学年高一上学期第一次月考数学试题(已下线)专题02 基本不等式求和的最小值-2021-2022学年高一《新题速递·数学》(人教A版2019)(已下线)第04练 等式性质与不等式性质、基本不等式-2022年【寒假分层作业】高一数学(人教A版2019选择性必修第一册)河南省商丘市宁陵县高级中学2022-2023学年高一上学期第一次月考数学试题四川省南充市营山县营山中学校2022-2023学年高一上学期10月月考数学试题四川省成都市成都市第七中学2022-2023学年高一上学期10月月考数学试题河南省周口市郸城县优质2022-2023学年高一上学期第二次月考数学试题江西省九江市都昌蔡岭慈济中学2022-2023学年高一下学期期中数学试题(已下线)2.2 基本不等式(第2课时)(导学案)-【上好课】(已下线)2.2 基本不等式(第1课时)(导学案)-【上好课】(已下线)2.2 基本不等式(第1课时)(分层练习)-【上好课】(已下线)2.2 基本不等式(第2课时)(分层作业)-【上好课】 山东省淄博第七中学2023-2024学年高一上学期10月月考数学试题
名校
解题方法
10 . 某校兴趣小组在如图所示的矩形区域内举行机器人拦截挑战赛,在 处按方向释放机器人甲,同时在处按方向释放机器人乙,设机器人乙在
处按方向释放机器人甲,同时在处按方向释放机器人乙,设机器人乙在 处成功拦截机器人甲,两机器人停止运动.若点在矩形区域内(包含边界),则挑战成功,否则挑战失败.已知米,为中点,比赛中两机器人均匀速直线运动方式行进,记与的夹角为(
处成功拦截机器人甲,两机器人停止运动.若点在矩形区域内(包含边界),则挑战成功,否则挑战失败.已知米,为中点,比赛中两机器人均匀速直线运动方式行进,记与的夹角为( ),与的夹角为(
),与的夹角为( ).
). ,足够长,机器人乙挑战成功,求两机器人运动路程和的最大值;
,足够长,机器人乙挑战成功,求两机器人运动路程和的最大值;
(2)已知机器人乙的速度是机器人甲的速度的 倍.
倍.
(i)若 ,足够长,机器人乙挑战成功,求
,足够长,机器人乙挑战成功,求 .
.
(ii)如何设计矩形区域的宽的长度,才能确保无论的值为多少,总可以通过设置机器人乙的释放角度使机器人乙挑战成功?
内举行机器人拦截挑战赛,在处按方向释放机器人甲,同时在处按方向释放机器人乙,设机器人乙在处成功拦截机器人甲,两机器人停止运动.若点在矩形区域内(包含边界),则挑战成功,否则挑战失败.已知米,为中点,比赛中两机器人均匀速直线运动方式行进,记与的夹角为(),与的夹角为().
,足够长,机器人乙挑战成功,求两机器人运动路程和的最大值;(2)已知机器人乙的速度是机器人甲的速度的
倍.(i)若
,足够长,机器人乙挑战成功,求.(ii)如何设计矩形区域
的宽的长度,才能确保无论的值为多少,总可以通过设置机器人乙的释放角度使机器人乙挑战成功?
您最近一年使用:0次
2021-08-19更新
|
1502次组卷
|
10卷引用:江苏省苏州市常熟市2021-2022学年高二上学期暑期自主学习调查数学试题
江苏省苏州市常熟市2021-2022学年高二上学期暑期自主学习调查数学试题山东省青岛市胶州市2020-2021学年高一下学期期末数学试题福建师范大学附属中学2021-2022学年高一下学期期中考试数学试题(已下线)第6章 平面向量及其应用(压轴30题专练)-2021-2022学年高一数学考试满分全攻略(人教A版2019必修第二册)(已下线)高一数学下学期期末精选50题(压轴版)-2021-2022学年高一数学考试满分全攻略(人教A版2019必修第二册)(已下线)高中数学 高一下-5福建省宁德第一中学2022-2023学年高一下学期3月月考数学试题湖南省长沙市雅礼中学2023-2024学年高二下学期入学检测数学试题湖北省武汉外国语学校2023-2024学年高二上学期9月月考数学试题(已下线)专题02 解三角形(2)-【常考压轴题】


